「ロボッ手」の製作
ロボットを作ろうとするとき、人間の歩行や手の動きを再現してみたいと思うことはよくあります。本校でもこれまでにまざまな形でこれらの課題にチャレンジしてきました。



今年は、5本の指の動きをできるだけリアルに再現する「ロボッ手」を作ったので報告します。
すべての関節には小型のモータが入っており、それぞれ適当なギア比で減速し、それぞれの関節が動くようになっています。
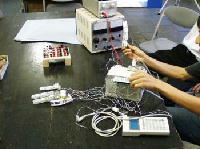

それぞれのモータはシーケンサーからの信号により、与えられた順番で動きます。例えば、5本指を順番に動かして手をひらいたり閉じたりすることなど。
これまでは、ワイヤーで引き上げるものなどを作っていましたが、今回はじめてすべての関節にモータを使用するという方法をとりました。モータは軸 径が1mmのものであり、市販のギヤボックスなどが使用できないため、プラ板を切り出し、適当な歯車をかみあわせています。各指の骨格もすべてプラ板を切 り出して作りました。それぞれの部品が小さいことと、指が動いときのたわみなどで、すべてのギアを正しく動かすまでにかなりの時間がかかってしまいまし た。
一応、希望通りの動きをさせることには成功しましたが、よりリアルな動きをさせるためには、モータの角度による制御を行ったほうがよいかもしれません。
4人のグループで完成まで半年。夏休みもほとんど製作に明け暮れました。よく頑張ったと思います。
これからチャレンジする人たちの参考に少しでもなれば嬉しいです。
投稿者:門田和雄(東京工業大学附属科学技術高等学校)


投稿者プロフィール
最新の投稿
 Gijyutu.com2026年7月11日技術室の掲示物「工具を表すかねへんの漢字」
Gijyutu.com2026年7月11日技術室の掲示物「工具を表すかねへんの漢字」 PR記事2026年7月10日研修イノベーション ~「これで授業してみたい!」への道~
PR記事2026年7月10日研修イノベーション ~「これで授業してみたい!」への道~ 3Dプリンタ2026年6月25日3Dプリントでつくる!技術室の壁面収納
3Dプリンタ2026年6月25日3Dプリントでつくる!技術室の壁面収納 Gijyutu.com2026年6月11日デジタル虫眼鏡の活用
Gijyutu.com2026年6月11日デジタル虫眼鏡の活用
関連するお勧め教材
\ 最新情報をチェック /