第3回東工大附機械科2年ロボットコンテスト
1999/03/13
1998年3月13日決勝戦実施
 ●特徴
●特徴
今年の学内ロボコンはタイヤ等の足回りをなくし、本体は固定された12Vモータの上で動かすことです。これにより、製作者はボールを動かすメカニ ズムに集中して取り組むことができました。また、今回の競技内容および競技場の製作、配線等は対外的なロボコンにいくつか参加した3年生によるものです。
●競技内容
ボールプールにある40個の球を2分間にいくつ自分のゴールに入れることができるかを競います。得点は、自分のロボットを置く大きなゴールに入れ た球は1個1点、自分のロボットの横にある小さなゴールの片方に入れた球は1個2点、反対側にある相手のロボットの横の片方のゴールに入れた球は1個3点 になります。
●競技規定
- 電源は本体を回転させる12Vモータ1個と5Vモータが3個まで使用できる。
- それぞれのモータはon(正転)-off-on(逆転)のスイッチがついているコントローラで操縦を行う。
- 大きさは競技開始時に縦横25cm高さ50cm以内に収まっていること。
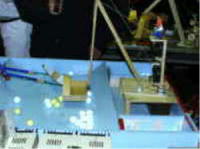
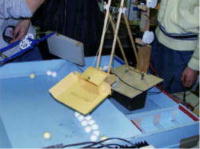

●試合の様子
今回のロボットは大きさ制限が厳しかったため、高得点を狙うためには競技開始後に伸縮する設計をしなければならなかった。そのため、リンクやカム だけでなく、糸とプーリーを組み合わせたものやufoキャッチャーを真似たものなど例年になくユニークなロボットが現れた。ロボットが前方に伸びると重心 の位置も大きく変化するため構造にはかなり苦心したようである。
投稿者:門田和雄(東京工業大学付属科学技術高校)


投稿者プロフィール
最新の投稿
 3Dプリンタ2026年2月13日書籍「AI時代の技術のオモシロ教材集」発刊
3Dプリンタ2026年2月13日書籍「AI時代の技術のオモシロ教材集」発刊 おもしろ教材2026年2月2日「ポケモンプログラミング」でプロラミングの共通導入
おもしろ教材2026年2月2日「ポケモンプログラミング」でプロラミングの共通導入- Gijyutu.com2026年2月1日「でんまね」で風力発電から電力測定
 Gijyutu.com2026年1月17日AIの姿勢分析モデル(PoseNet)と連動したモーター制御
Gijyutu.com2026年1月17日AIの姿勢分析モデル(PoseNet)と連動したモーター制御
関連するお勧め教材
\ 最新情報をチェック /