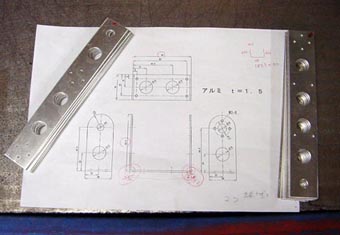
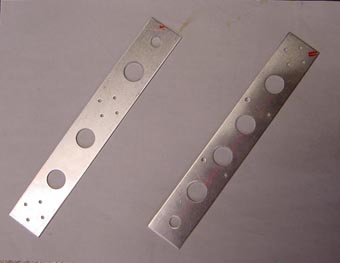
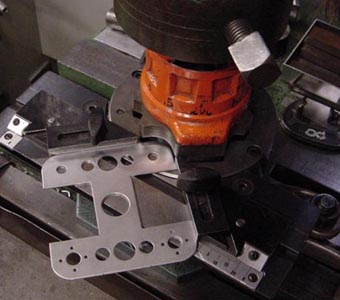
板金屋さんでのロボット部品加工1
2004年8月30日
投稿者:東京都 東京工業大学工学部附属工業高校 門田和雄
|
|||||||||
| 最終更新日 ( 2010/11/27 土曜日 12:03:35 JST ) | |||||||||



投稿者プロフィール
最新の投稿
 おもしろ教材2014年7月1日ラズベリーパイ講習会@桜美林中学(2014.7.19)
おもしろ教材2014年7月1日ラズベリーパイ講習会@桜美林中学(2014.7.19)- 金属2013年11月26日ホブ盤による歯車加工
- 技術室整備2013年7月6日木の葉書を利用した木材見本
- おもしろ教材2011年1月6日ノギスの原理
関連するお勧め教材
\ 最新情報をチェック /