 大穂中
大穂中 前回からの進展と平行クランク機構
チーム名: つくば市立大穂中学校亜空間カルシウム
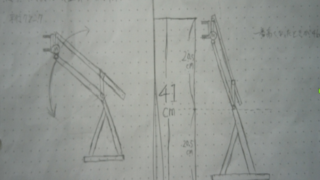
このロボットの前回からの進展は、主に平行クランク機構である。試作として木材をベースにしており、円運動を行えるようになっている。
片方に糸を取り付け、上下に可動することを目指した。パー...
大穂中 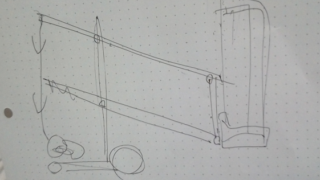 大穂中
大穂中  大穂中
大穂中  ☆オンライン交流会
☆オンライン交流会  ★動画URL
★動画URL  大穂中
大穂中 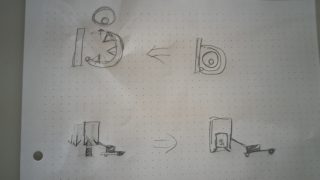 大穂中
大穂中 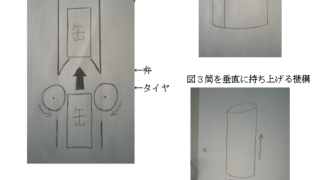 大穂中
大穂中 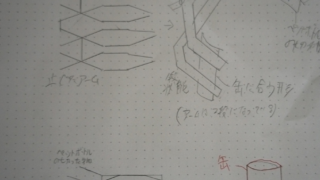 大穂中
大穂中 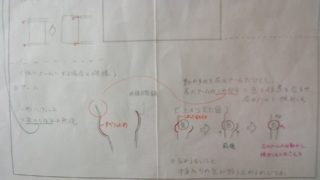 大穂中
大穂中