現段階で我々のチームでは、①缶をつかむ機構と、②アームの動かし方をある程度考察しました。
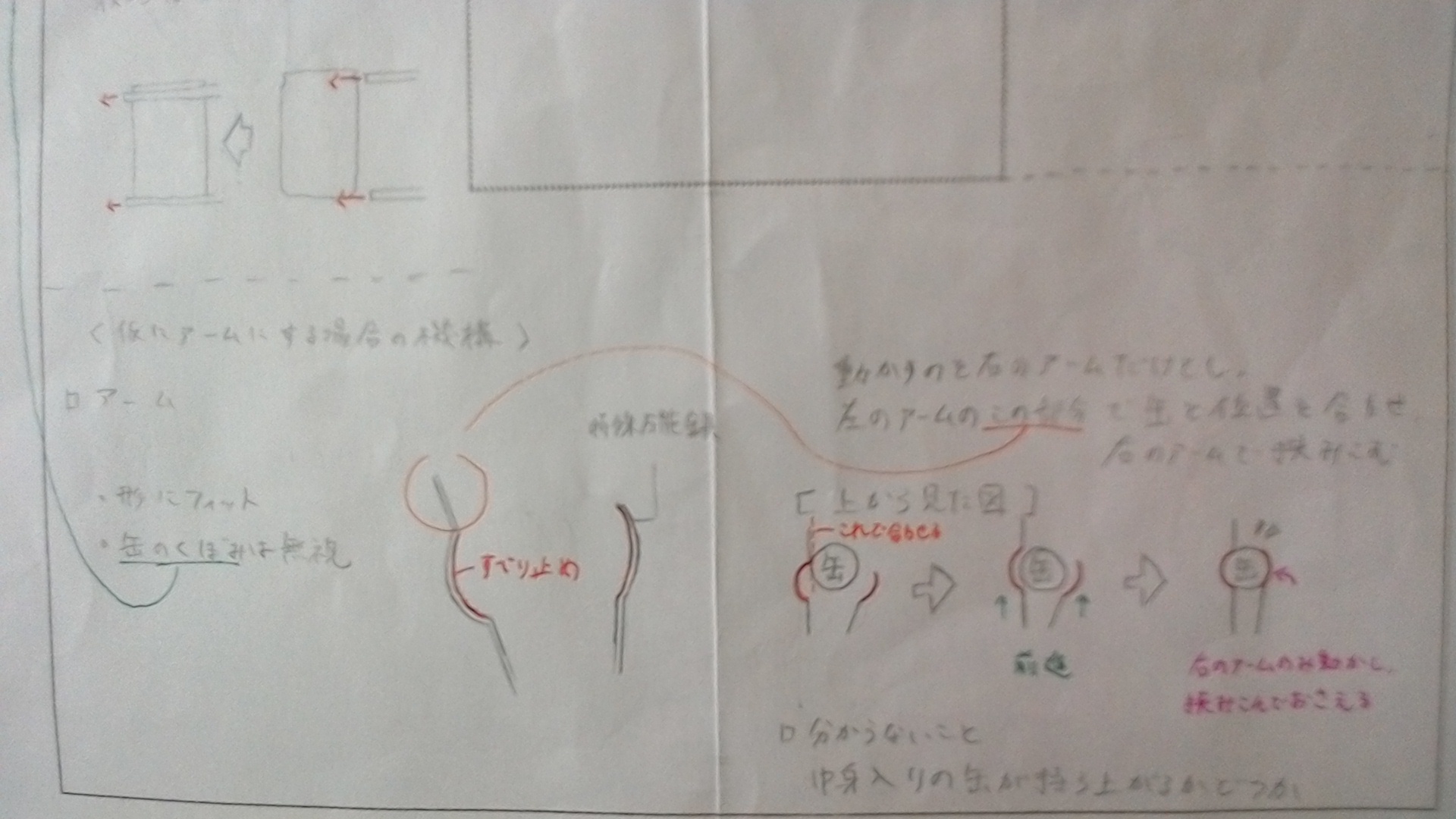
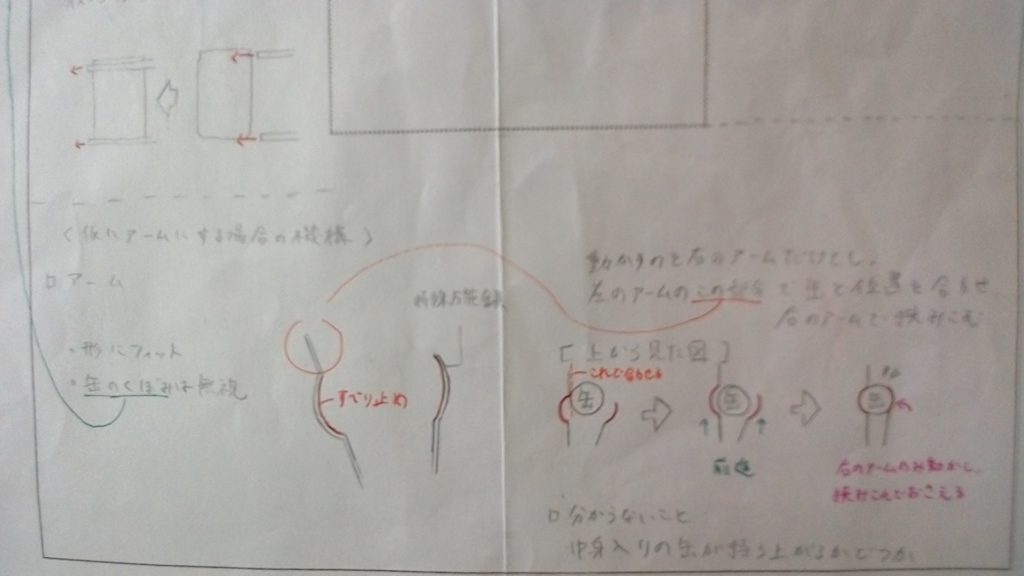
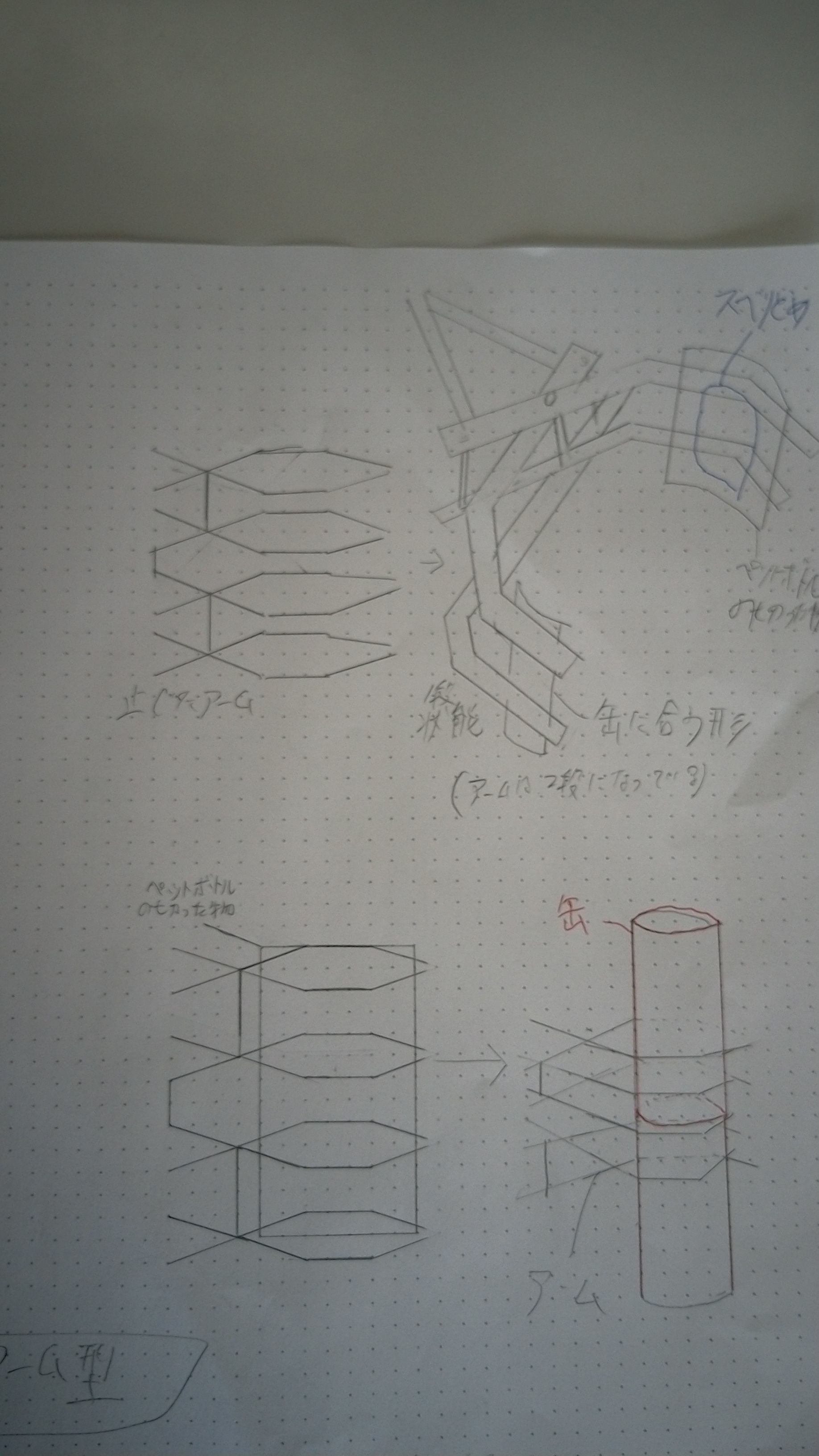
①缶をつかむ機構は、爪が二つずつついたパーツで両側から缶を挟んでつかむというものですが、ただのつかむ機構ではありません。まず左の爪で位置を合わせ、その後右のアームのみを動かして缶を挟んでつかむというものです。これだけでもかなり正確性が向上します。
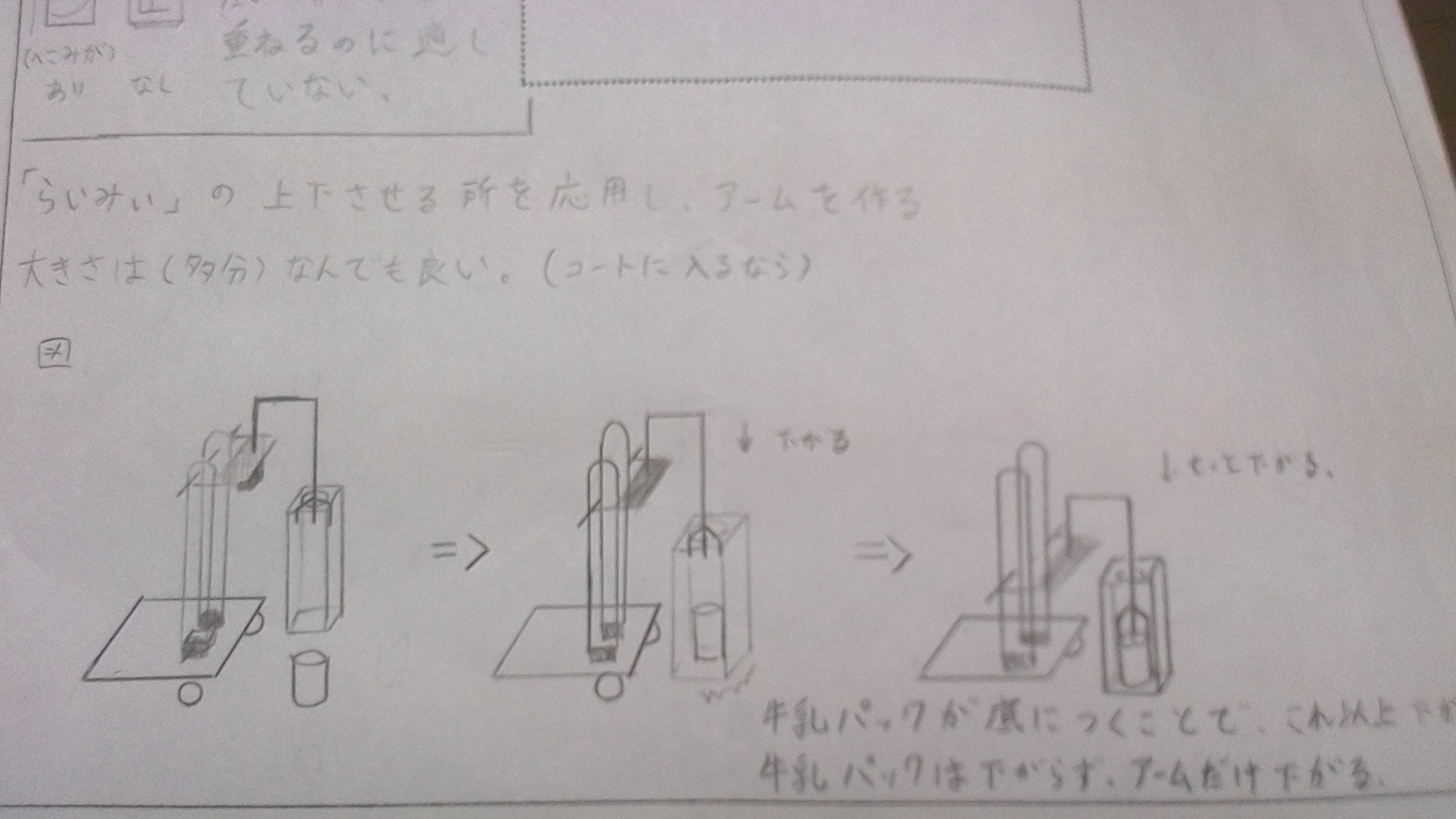
②アームの動かし方は、平行クランクを取り入れる予定です。先ほどの「缶をつかむ機構」でつかんだ缶を常に地面と平行の状態にするためです。こうすることで、変わるのは高さだけになるので、缶を積み上げることにも正確性が向上します。
土台に関しては、初動の周回のときの旋廻性を高めるために今のところ円形にする予定です。
コメント