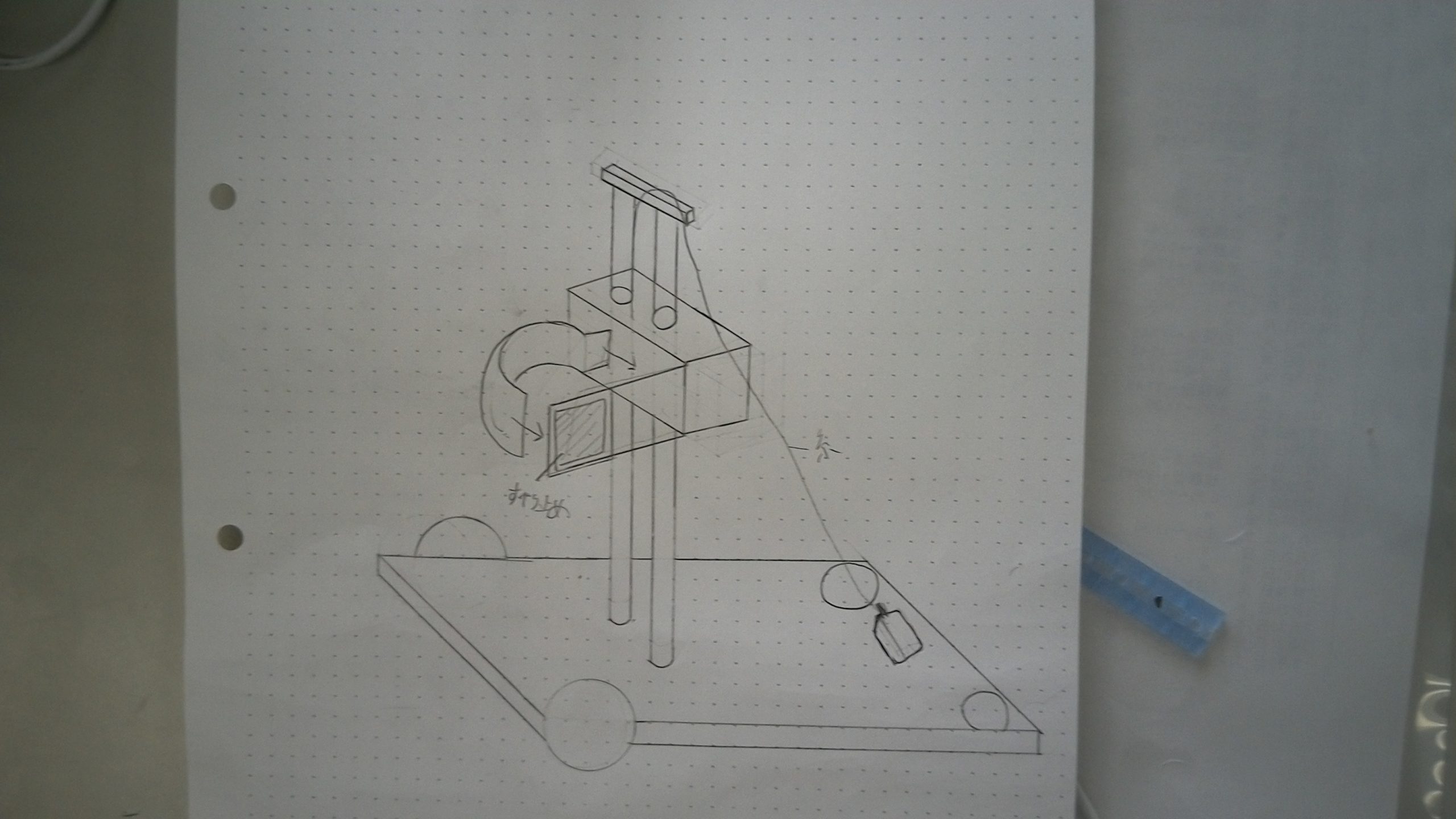
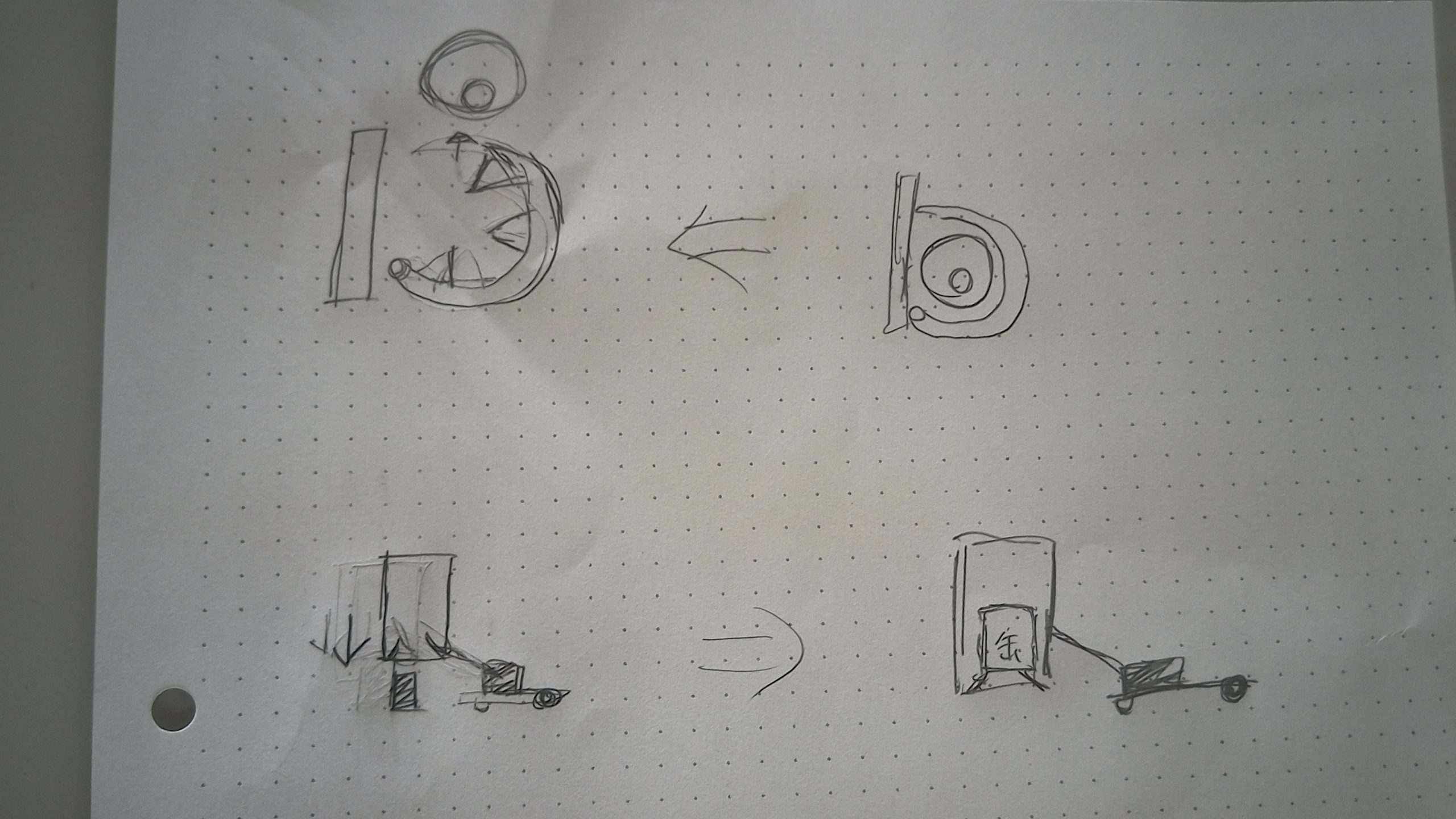
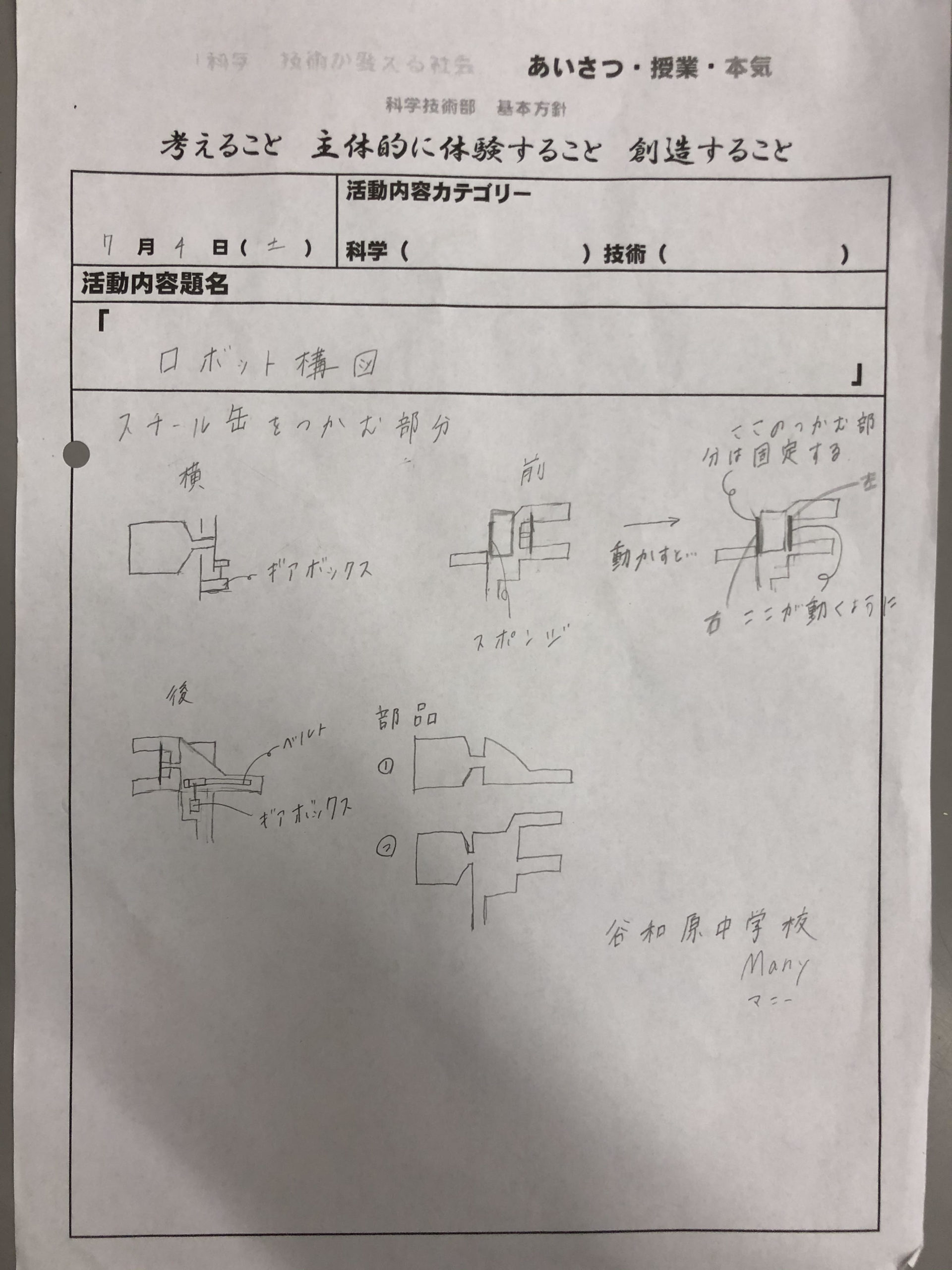
アームの部分に関しては、このロボットは、持ち上げる機構と、掴む機構にわかれています。まず、掴む機構について、アームの仕様が左右で異なっており、左側は、平面の板で、滑り止めがついており、安定性を高めました。
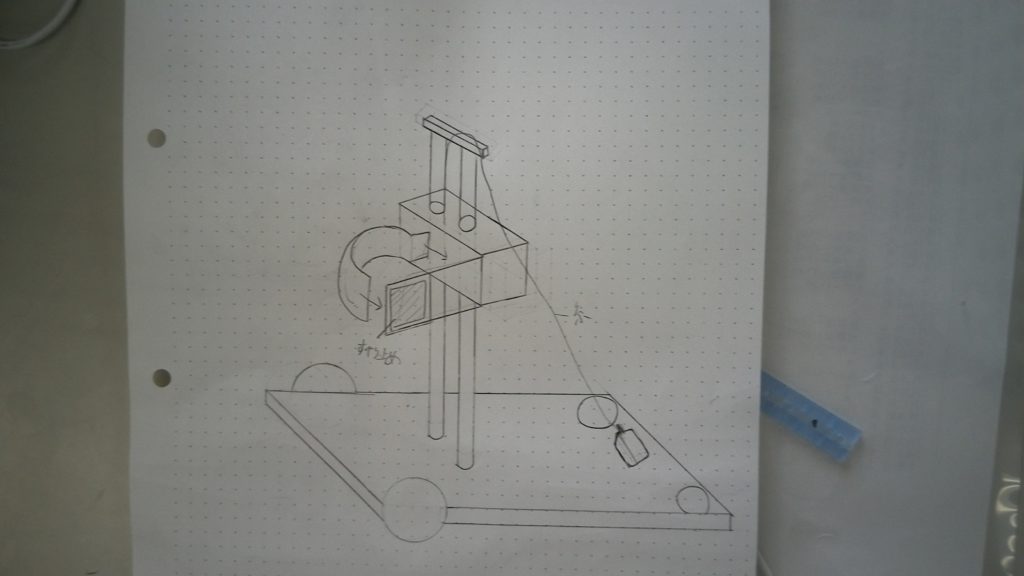
右側は、缶の形状と同じようになっており、軽い素材にしています。右側のアームは、モーターで、左右に可動し、缶の補助をしています。次に、持ち上げる機構についてですが、二本の支柱によって安定して、上下に動くようになっています。ちなみに支柱の素材は軽めにして動きを早く本体の軽量化を試みています。
その支柱の間に軽いボックスをつけてアームのバランスを維持しています。ですが、この設計だとバランスがうまく保てません。なので後ろに糸を引いて、バランスをとっています。
コメント
全体的に重量がかなり重いと思いますが、旋回性能はどのようになっているのでしょうか。スピードなども気になります。