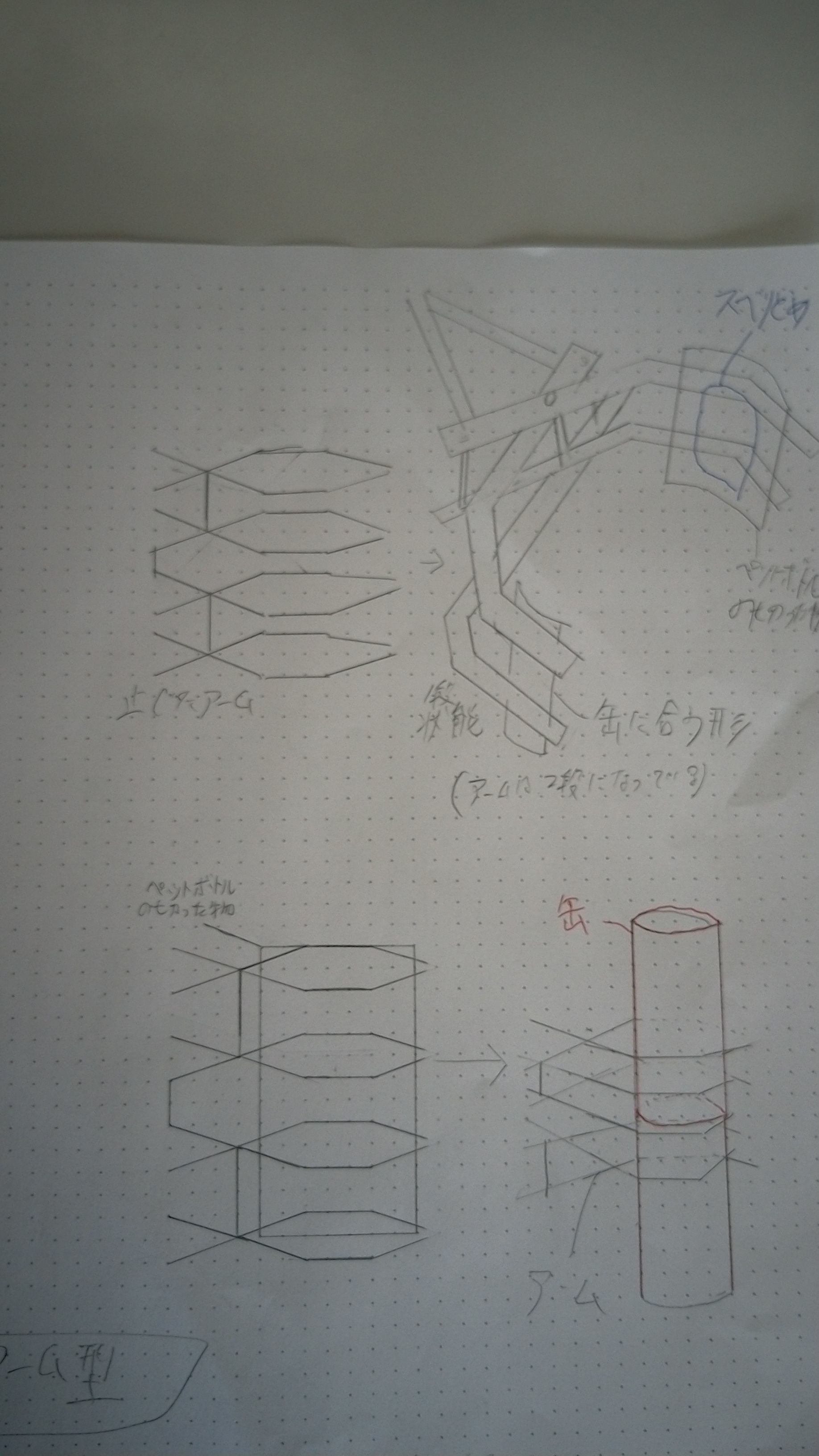
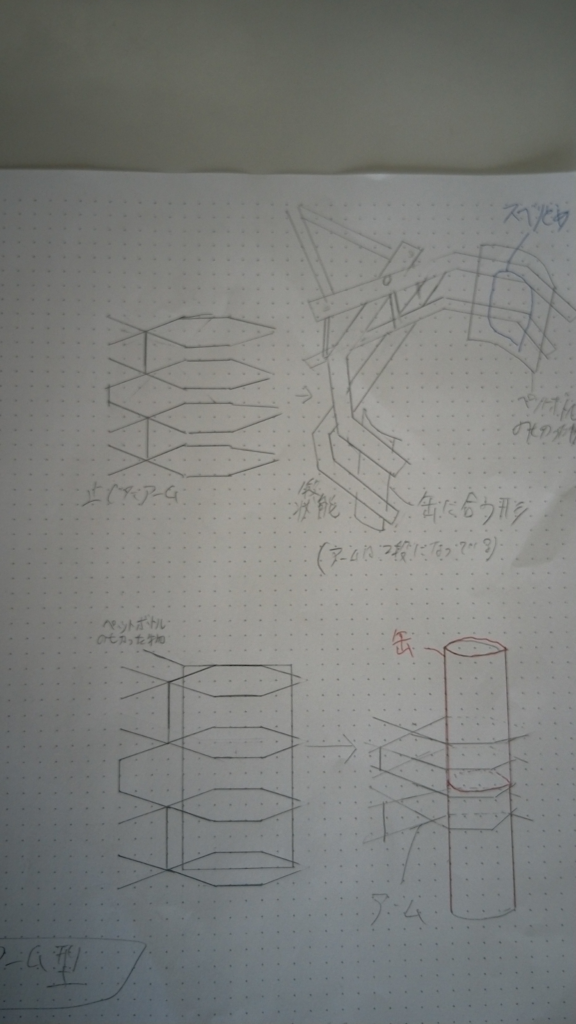
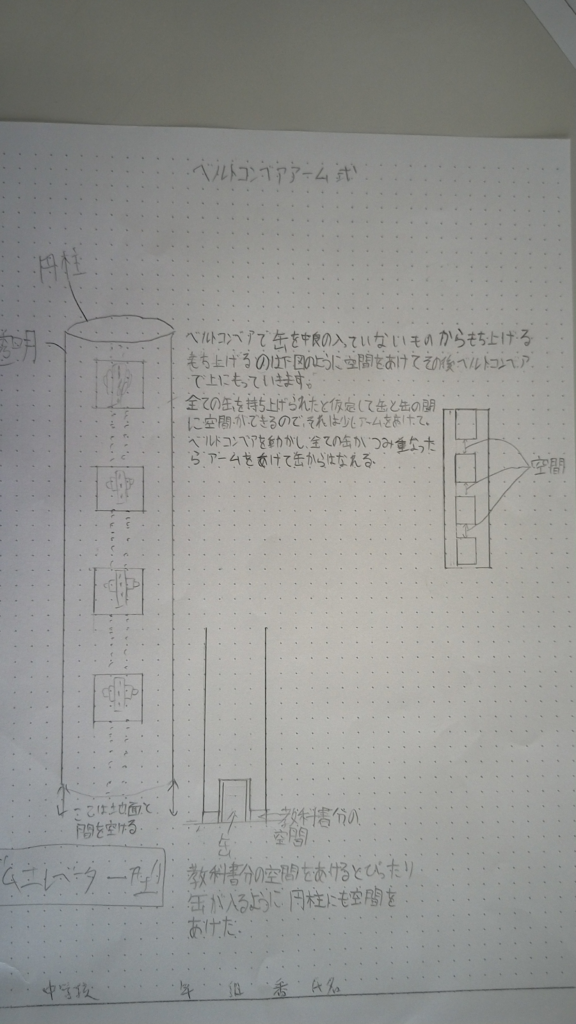
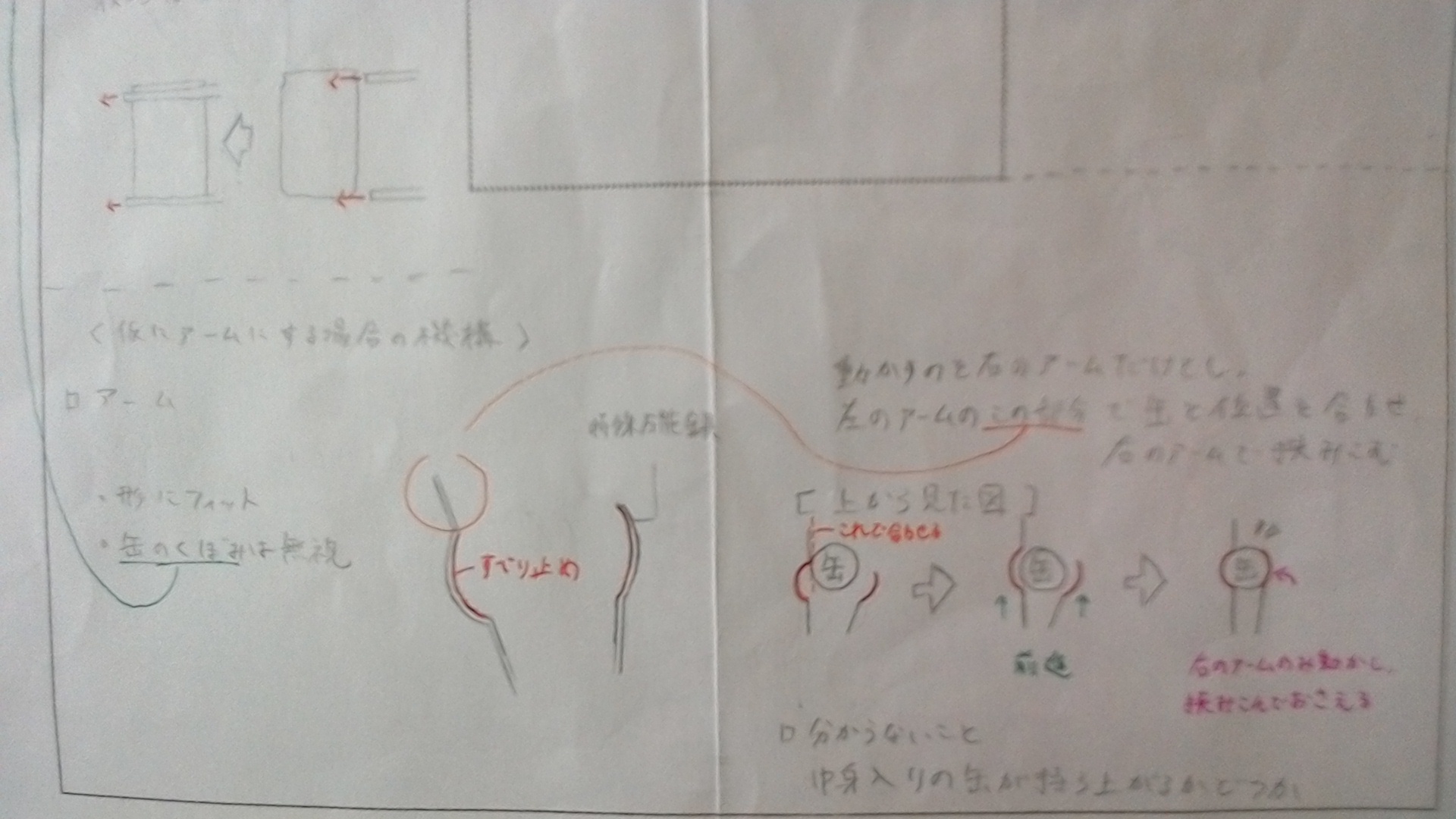
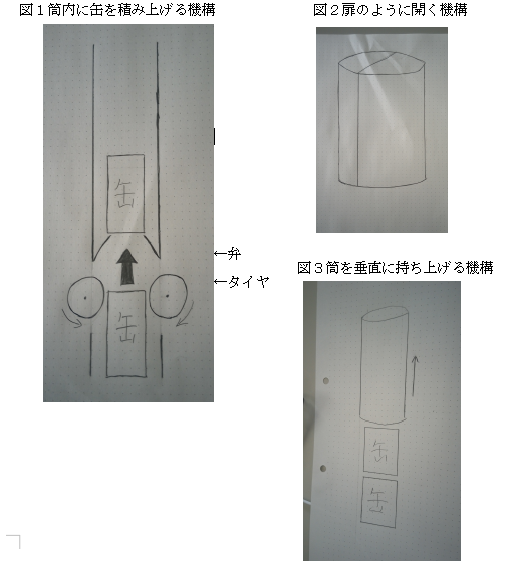
現段階では、缶を掴むアームを2段階にして2個掴む案とベルトコンベアで缶を4つ持ち上げ4つ積下す案の2つが出ております。1つ目の案のアーム式では、アームを2段にして2つの缶の間で掴み2つ持ち上げるというものです。2つ目の案ベルトコンベアでは、透明の円柱状アームの中にベルトコンベアをつけて4つの缶を持ちコートの土台にアームを載せてコンベアで全部下しアームを開いてロボットを下げるというものです。
(教科書があるため教科書分の下部分の長さは開けてある)
ロボットの高さは缶が4つ積み重なったら約41cmなのでアームをは約50cmを予定しています。土台に関して旋回性とロボットを軽くするため丸形に予定しています。大きさは約20~25㎝予定です。
コメント