 大穂中
大穂中 大穂中我武者羅「現在の状況」
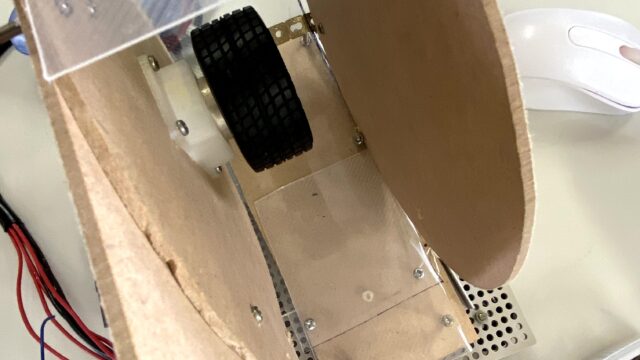
①射出ロボットの固定
オンラインロボコン時には射出ロボットは固定されておらず手でもって動かしていたが台に固定すると共に固定砲台のように向きを変えることができるようになった
②水球回収ロボットの変更点
前回のオンラインロボコ...
大穂中 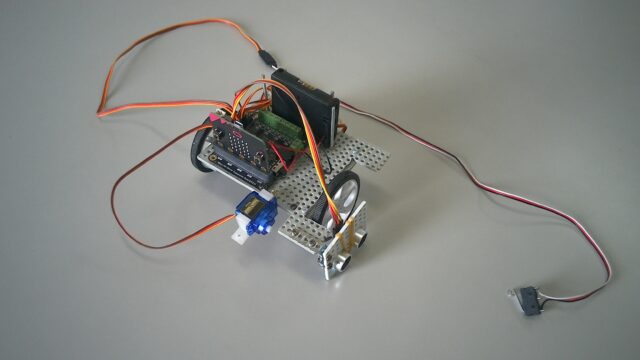 大穂中
大穂中  大穂中
大穂中  大穂中
大穂中  ☆オンライン交流会
☆オンライン交流会  ★動画URL
★動画URL  未分類
未分類  ☆オンライン交流会
☆オンライン交流会  大穂中
大穂中  ★動画URL
★動画URL