ウルトラソニックセンサーで壁に平行に進む
大穂中それいけくま五郎です。
1代目超音波センサーが届くまでは、タッチセンサーを大量に使い、動きを制御していましたが、今は超音波センサーという超音波を出して帰ってくるまでの時間からセンサーとものの距離を測定できるセンサーを使いロボットの動きを制御しています。そこで、今日は私たち大穂中のセンサーの歴史を振り返っていきたいと思います。

<1代目センサー>
1代目のセンサーは5v版の超音波センサーです。
このセンサーが届いたときそれを固定するパーツの製作も始めました。
このセンサーは5v版なので、 電圧問題や配線問題があり、とても苦戦していました。
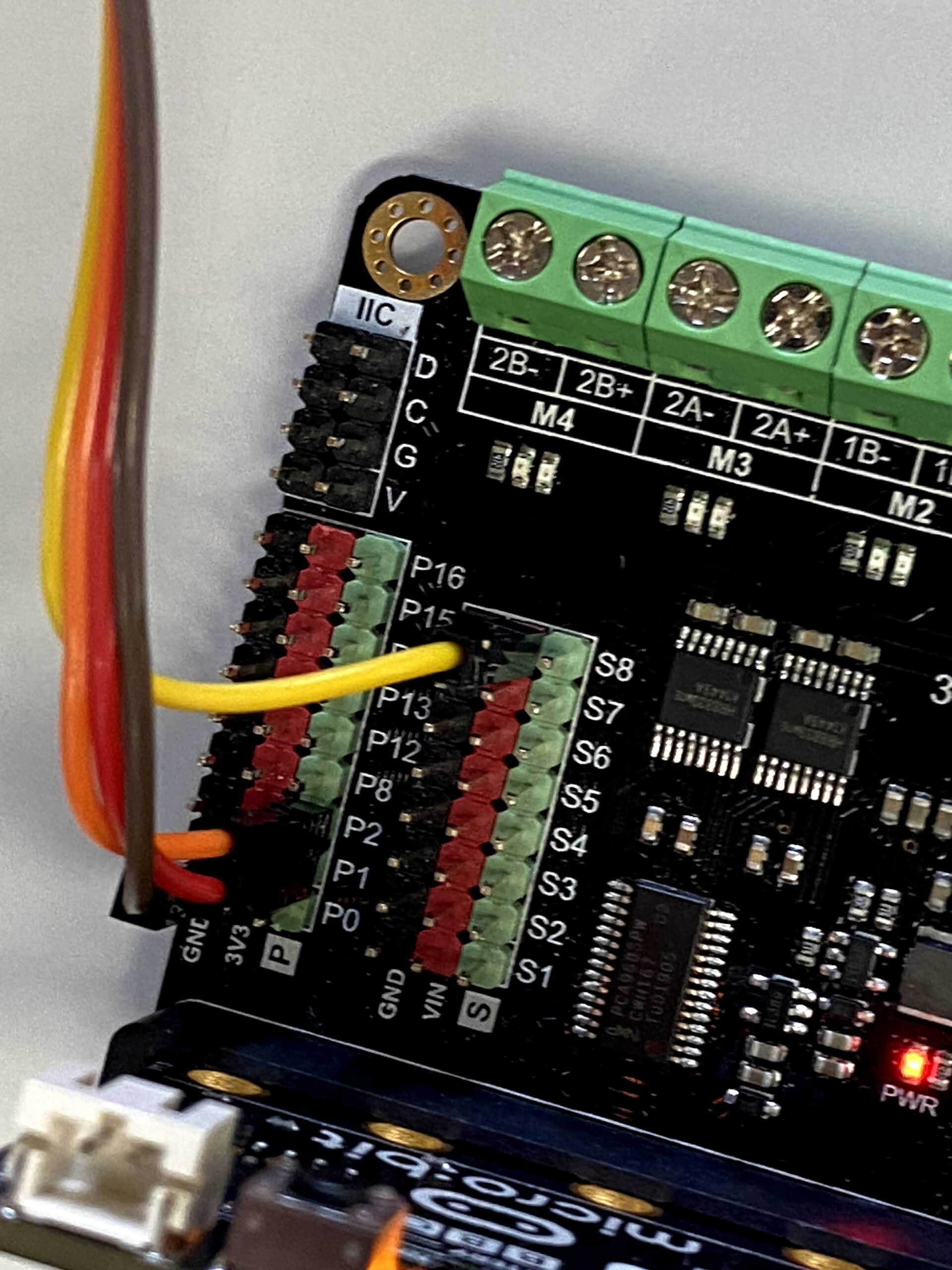
ものすごくバラバラな配線です。
一つ一つの線がバラバラなので、モーターなどが使える端子が少なくなってしまっていました。
また、モバイルバッテリーでしか動かないというデメリットもありました。
<2代目センサー>
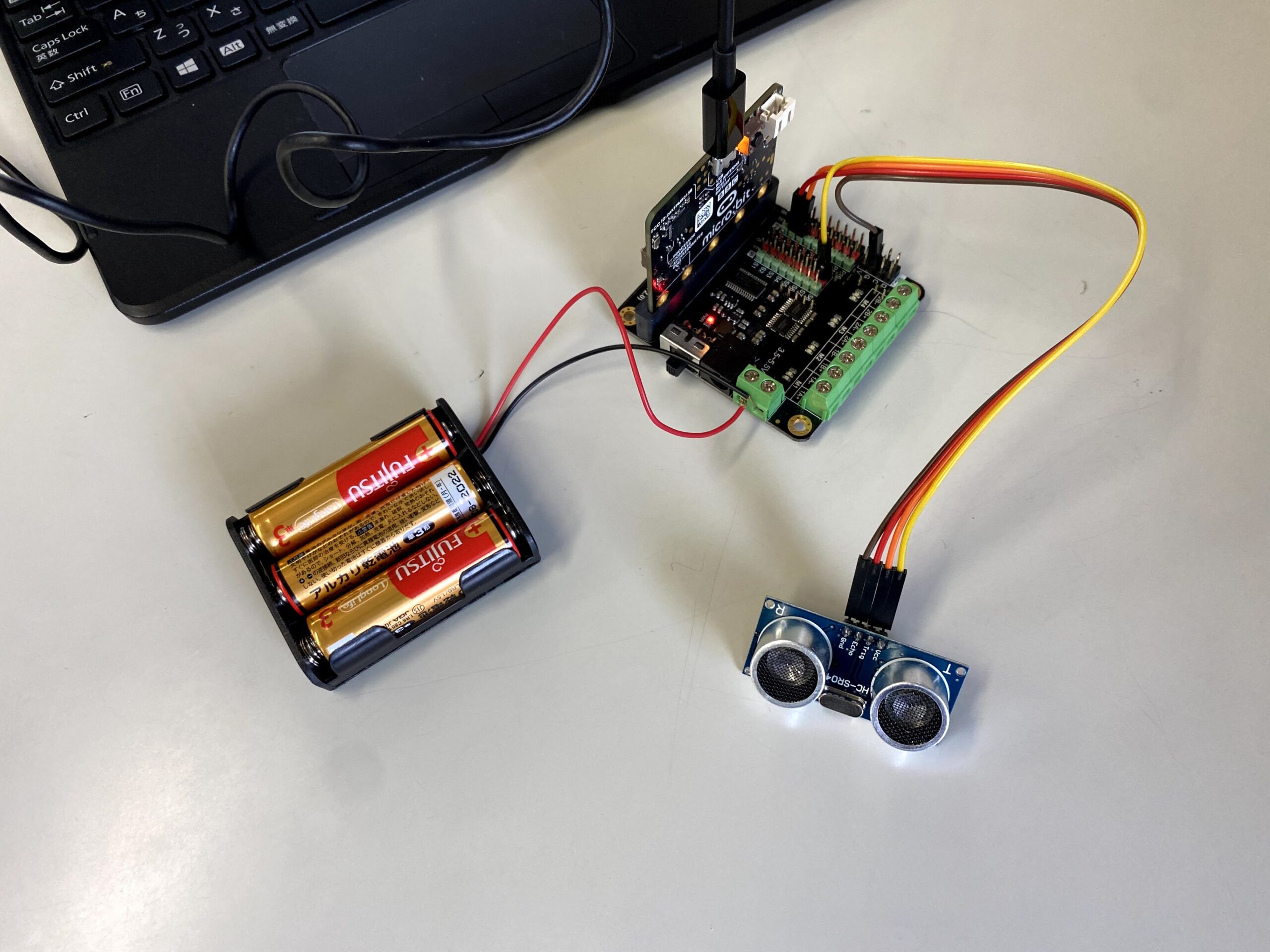
2代目のセンサーは 3v版の超音波センサーです。
モバイルバッテリーは卒業しましたが、配線問題はまだ解決していません。
ルール上でokな電池を使っていますが、
配線問題は未解決です。
<3代目センサー>
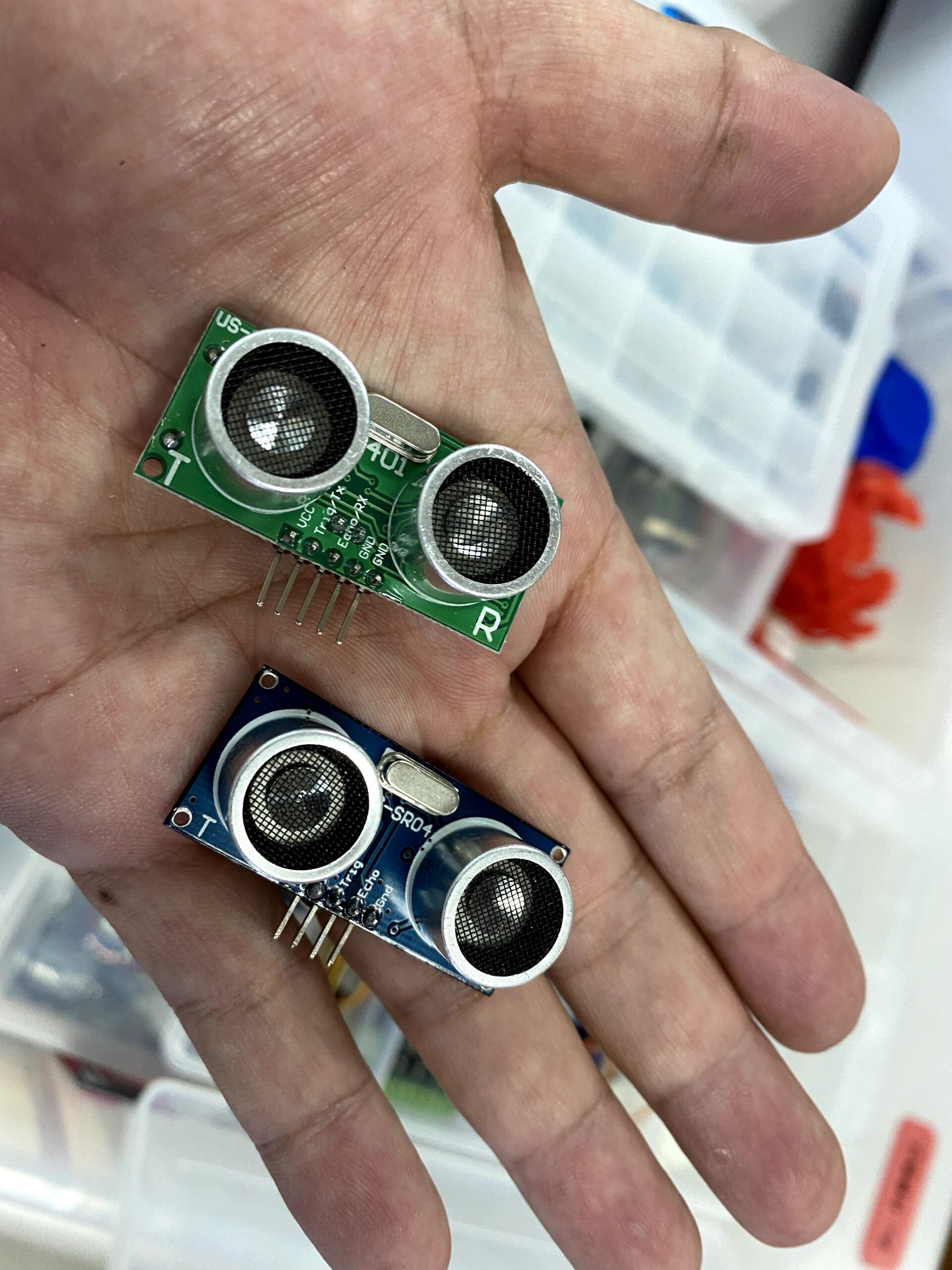
3代目のセンサーは結構お高いセンサーです。
今まではセンサー側には4つの端子がありましたが、このセンサーは7本もあり、いろいろな機能があります。
右:3代目超音波センサー
左:2代目超音波センサー
(3代目センサーには裏に2つ端子があるので、この画像では見えない)
この3代目センサーは二つの問題をすべて解決したセンサーで、今のロボットに使用しています。
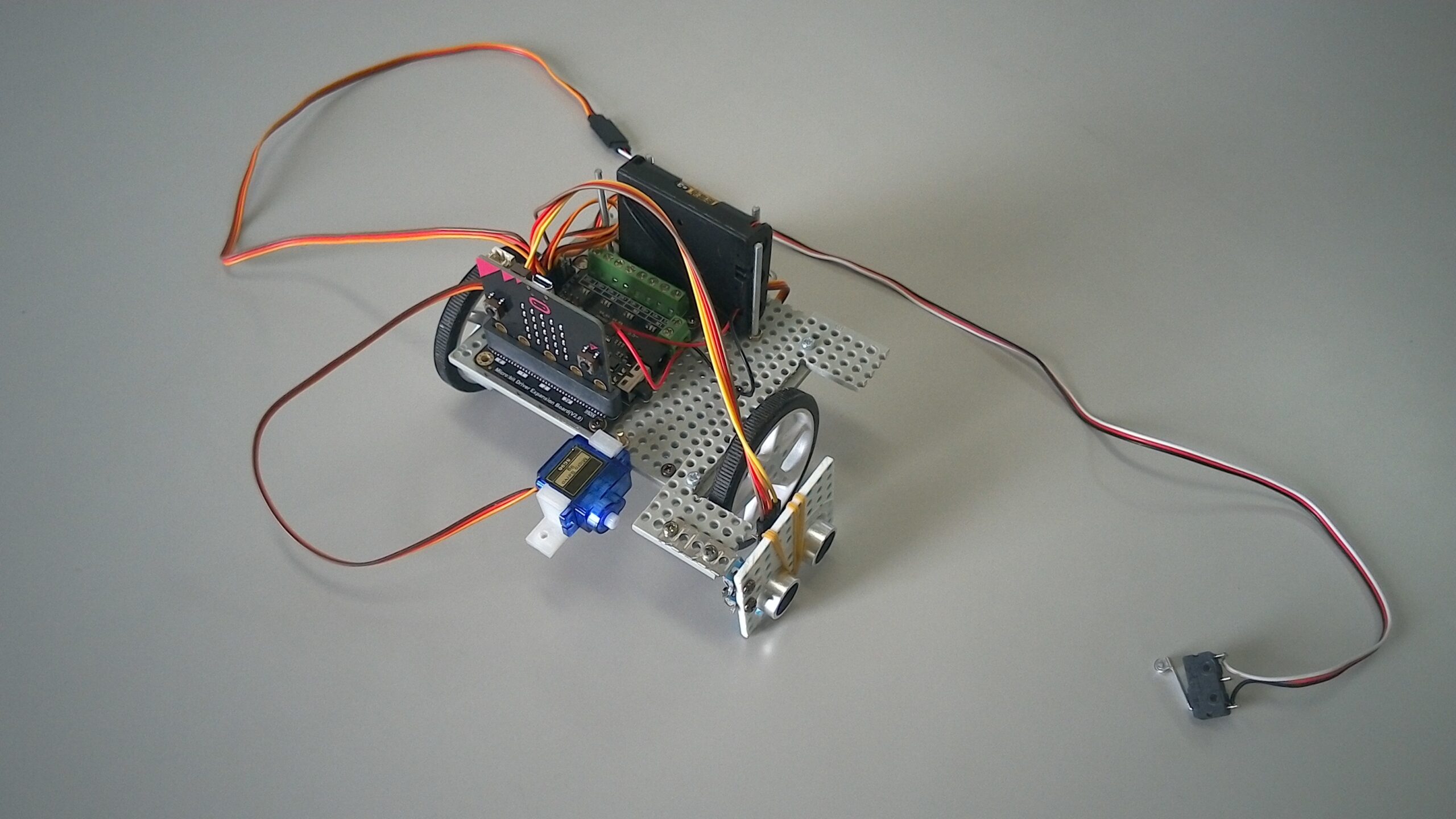
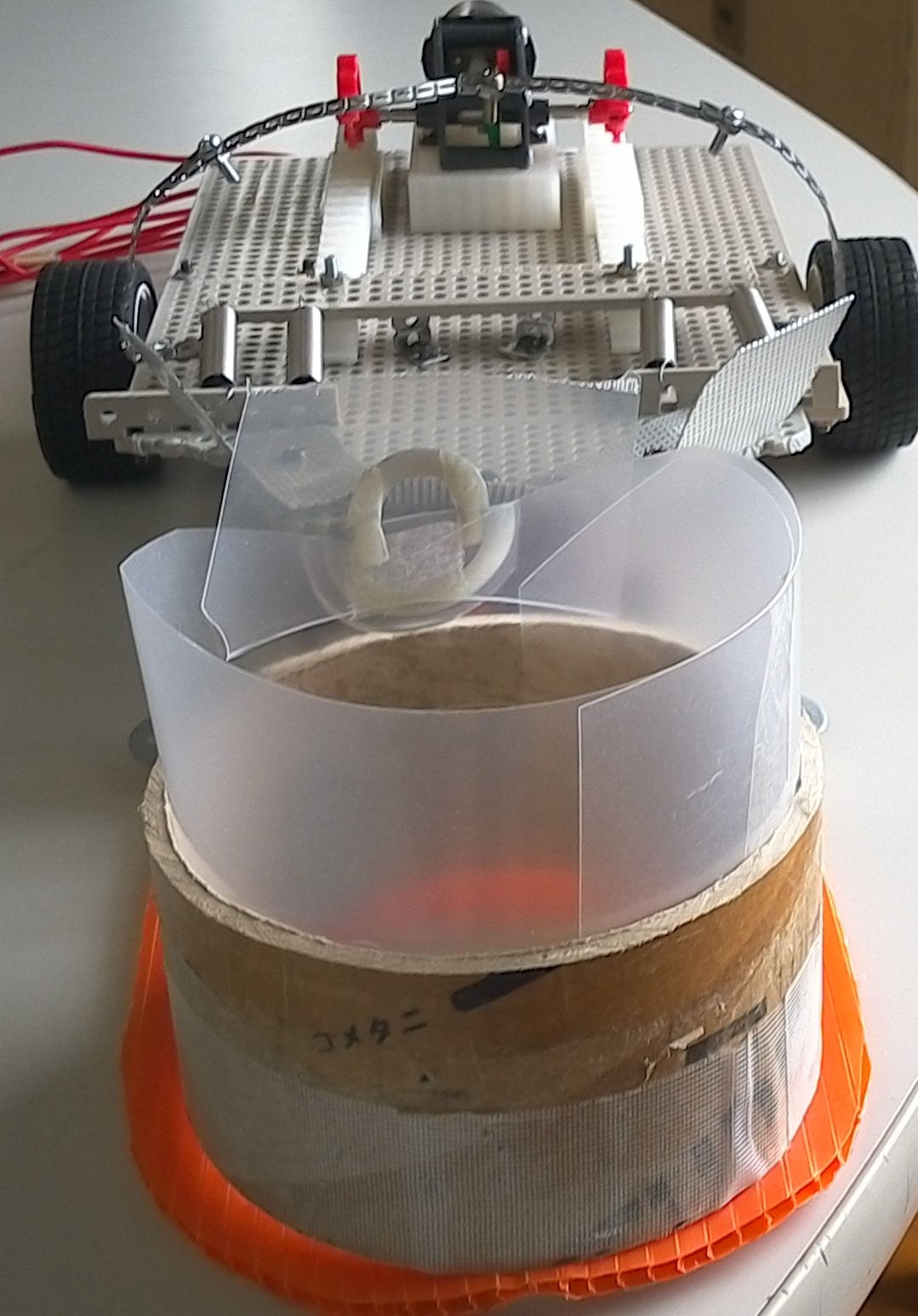
<現在のロボット>
これが現在のロボットです。
前についてるモータはアーム用です。
またタッチセンサーは緊急停止用のボタンです。
コメント
センサーを車体脇につけるという発想が興味深いですね!
センサーの苦労が手に取るようにわかりますね。
センサーの型番がわかれば教えてくださいませ!
ちなみに,3つの収穫場所の仕分けをどうするのかなぁ?!