 大穂中
大穂中 現段階の状況 大穂中らいみょんSKO
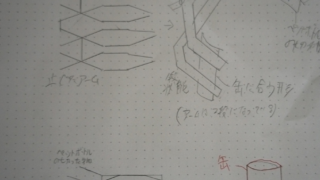
現段階では、缶を掴むアームを2段階にして2個掴む案とベルトコンベアで缶を4つ持ち上げ4つ積下す案の2つが出ております。1つ目の案のアーム式では、アームを2段にして2つの缶の間で掴み2つ持ち上げるというものです。2つ目の案ベルトコンベアでは、...
大穂中 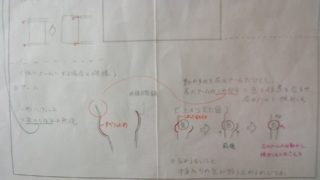 大穂中
大穂中  大穂中
大穂中  谷和原中
谷和原中  谷和原中
谷和原中  谷田部東中
谷田部東中  大穂中
大穂中  ★動画URL ★動画URL
★動画URL ★動画URL  博多中
博多中