
このチームは上下に動く手でつかむロボットをつくります。つかむ際のポイントは、2段に重ねた時に、缶のつなぎ目を握るようにして2本を同時にもちあげることです。

ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
このチームはいろいろ考えた結果、やはり「つかむ」ものをつくりりたいという結論に達しました。しかし、つかみ方を変えたいと。蓋の上から缶を握るタイプにするようです。なにやら利点があるそうなので、そこはまた次回。説明してもらいましょう。

ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
このチームは唯一、チーム名も決まりました。
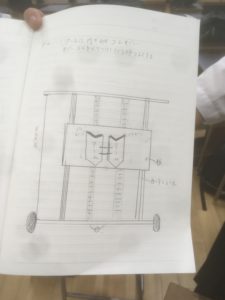
HKT5
です。2ピース缶のくぼみを利用します。そこに薄めの材料(MDFかアクリルで迷っています)を缶がちょうどよくフィットするように加工したものを差し込んでリフトで持ち上げます。その部分を試作しました。illustlatorでデータを作成し、レーザーカッターで加工します。今日は画用紙を使って試作しました。






コメント
上下に動く手でつかむロボットについてですが4つ取る時の挙動がきになりました。
上から掴むロボットはのせるときのバランスや中身の入ったものでも倒れそうになくて面白いですね HKT5のロボットは操作の繊細さが要求されるのがきになりました。
缶を運ぶときに、アームを作るよりもモーターを使う必要がないので、とても良いアイデアだと思いました。
しかし、少しの衝撃で運んでいる缶を落としてしまいそうですね。その点ではどんな対策をするのでしょうか。
返信遅れてすいません。
まだロボットを制作していなく、実際にやってみないとわからないので
実際にやってみてどうなるのかを試してから対策を考えていきたいと思っています。
なので今はどういう対策をとればいいのかが、まだわからないのが現状です。
長文失礼しました。