 大穂中
大穂中 大穂中それいけくま五郎「超音波センサー使用の経緯」
大穂中それいけくま五郎です。
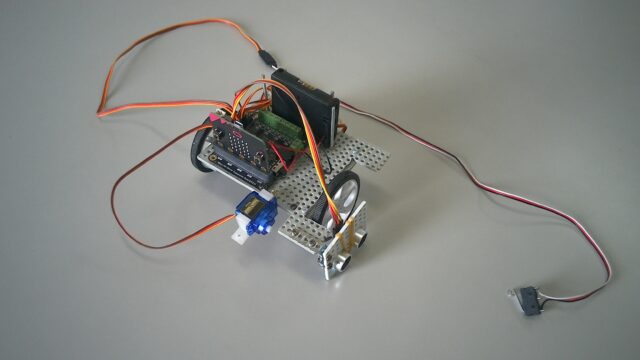
1代目超音波センサーが届くまでは、タッチセンサーを大量に使い、動きを制御していましたが、今は超音波センサーという超音波を出して帰ってくるまでの時間からセンサーとものの距離を測定できるセンサーを使いロボ...
大穂中  大穂中
大穂中  大穂中
大穂中  未分類
未分類  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  ★動画URL
★動画URL