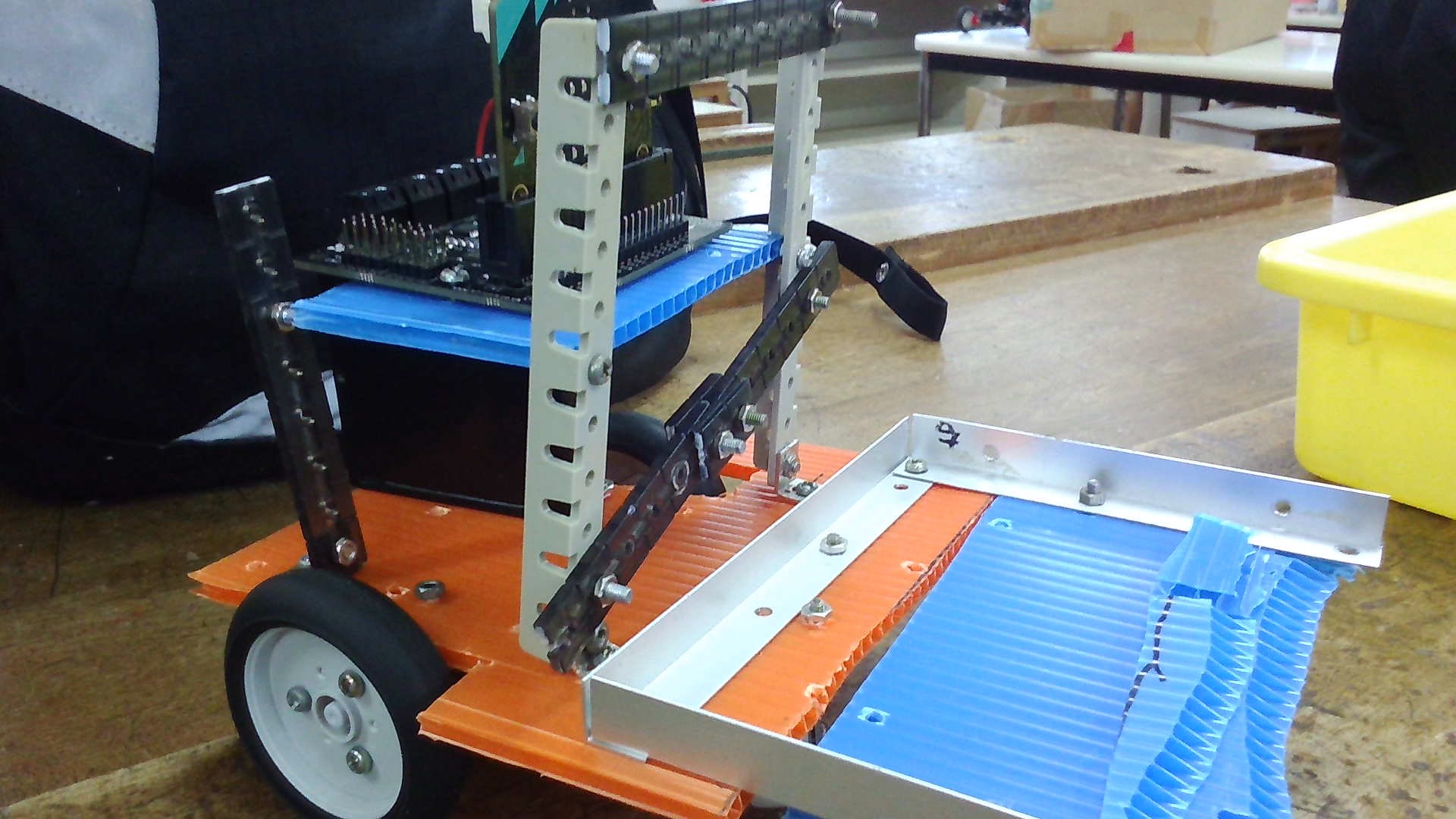

チームひとりです。7月6日時点の経過を報告します。PART1とはかなり異なる点もあります。前回のPART1を大幅に変え、別のロボットアームを合体した形にしました。それに超音波センサーを加えました。現時点では動かすことはできませんが、これを見ている時点でもしかしたら動かせるようになっているかもしれません。作戦は、障害物なしのただ行って帰ってを繰り返すだけの「猪突猛進」型にしました。プログラムはかなり簡単になってしまいますが、それも作戦の一つです。とりあ
えずのプログラムを貼っておきましたので、それもどうぞご覧ください。スタートエリア以外は全て操作はできないため、もちろん本番は変更します。とはいってもあまり参考にはならないと思いますが。いい方法、見つけた問題点などがありましたら、コメントで教えていただけると幸いです。


コメント