 ★動画URL
★動画URL 谷田部東チームC、ニャイアンツ
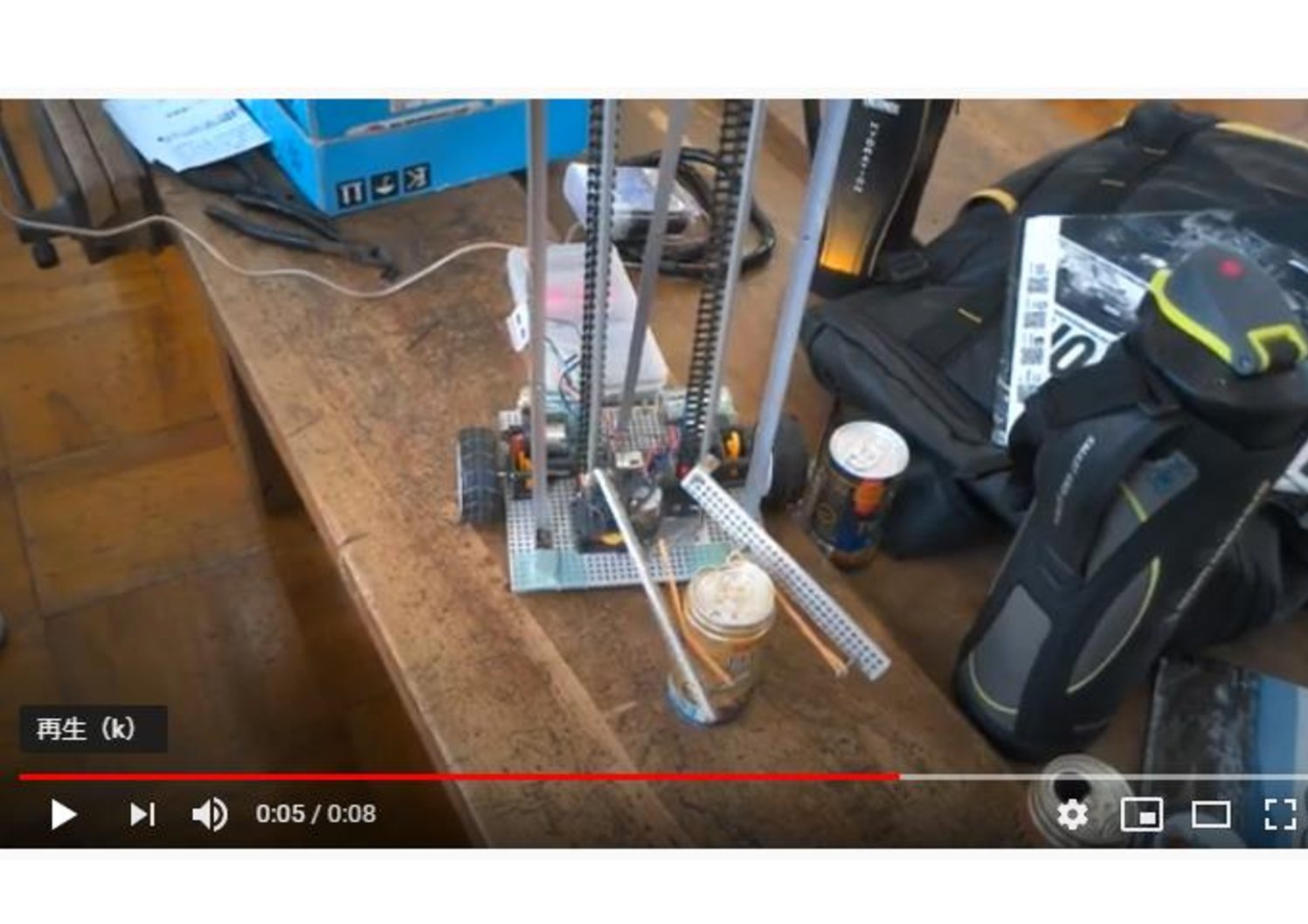
入っている缶をどう持ち上げるかが課題です。アームをどうしよう。。。
★動画URL  ★動画URL
★動画URL 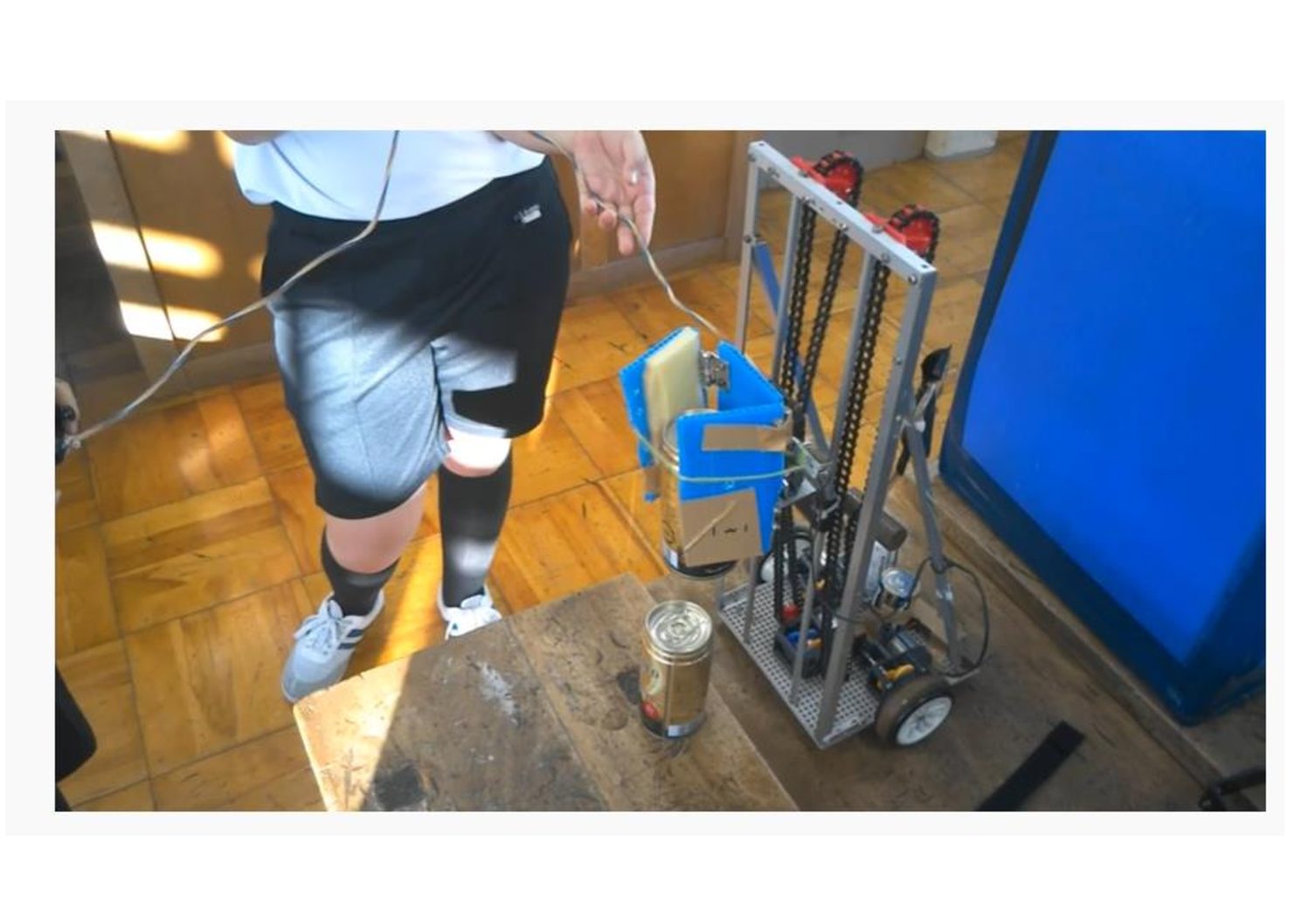 ★動画URL
★動画URL  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中