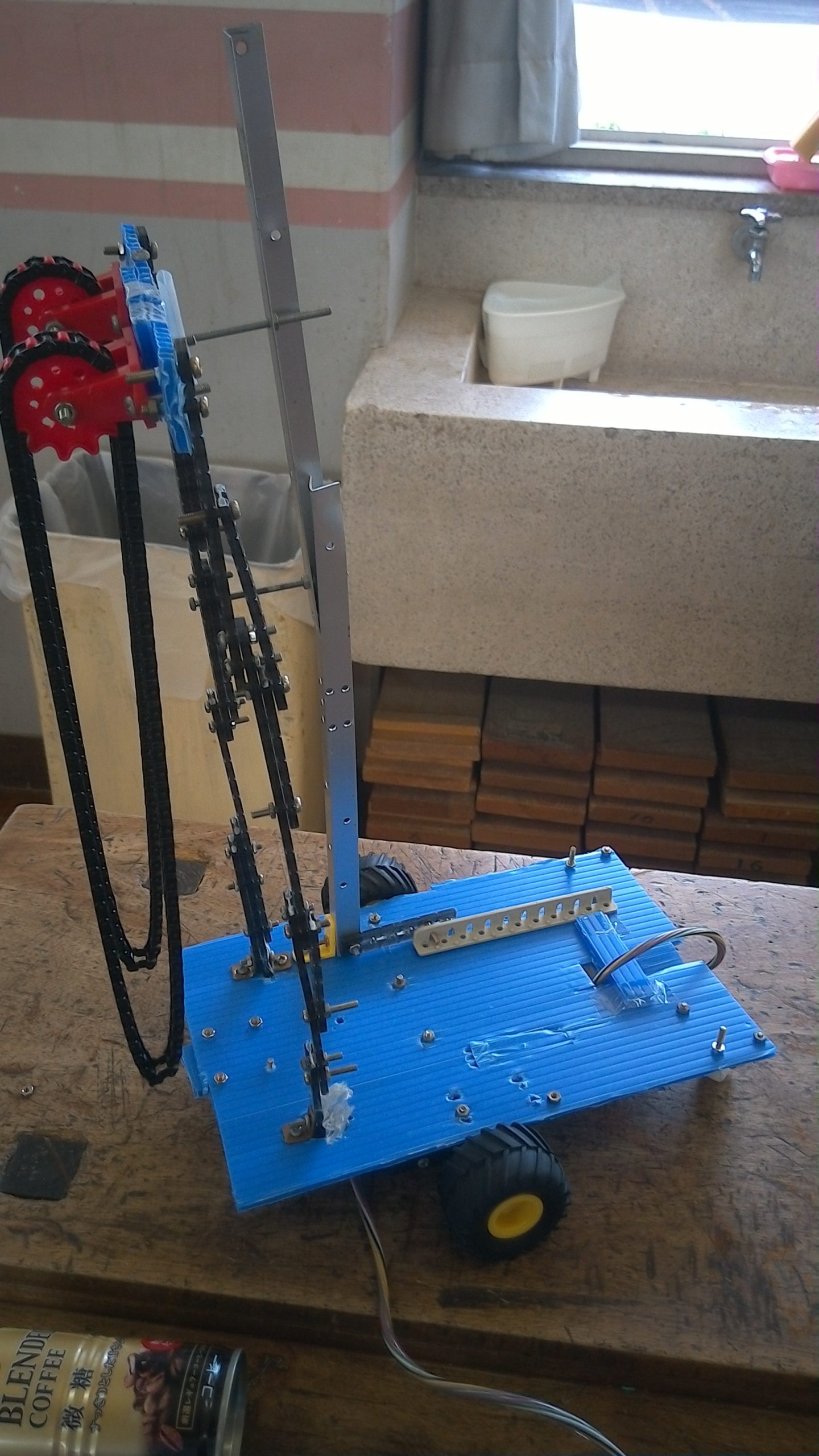
僕たちのチームは、チーム名の「オラフピーマン」のもとに、活動しています。僕たちのチームは、主に二つの工夫をしました。一つ目は、モーターです。使う目的に合わせて、モーターの種類によって、速く必要なところは速く、遅く必要なところは遅くして、ロボットの機能を増加させました。二つ目は、アームです。まだつけてないけど、アームに滑り止めをつけたことで、缶を持ち上げるグリップ力も増加させました。また、パクパクさせようと思っております。是非とも、参考させてください❕
チーム名:オラフピーマン

 谷田部東中
谷田部東中僕たちのチームは、チーム名の「オラフピーマン」のもとに、活動しています。僕たちのチームは、主に二つの工夫をしました。一つ目は、モーターです。使う目的に合わせて、モーターの種類によって、速く必要なところは速く、遅く必要なところは遅くして、ロボットの機能を増加させました。二つ目は、アームです。まだつけてないけど、アームに滑り止めをつけたことで、缶を持ち上げるグリップ力も増加させました。また、パクパクさせようと思っております。是非とも、参考させてください❕
チーム名:オラフピーマン

コメント
アームのギア比はどのようにしているのですか?教えてください。