私たち大穂中科学部では、マイクロビットを使用し、無線でロボットを操作することをはじめた。ルール上では、ブロックのアイテムをコートの範囲内に置き、加点されるというものだが、想像以上の難易度となった。知識ゼロからプログラムをやり始め、ひたすらに試行錯誤を繰り返した。そこで、私たちは、アイテムを機内に取り込み、放出するという考えに至った。
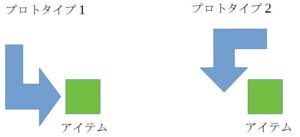
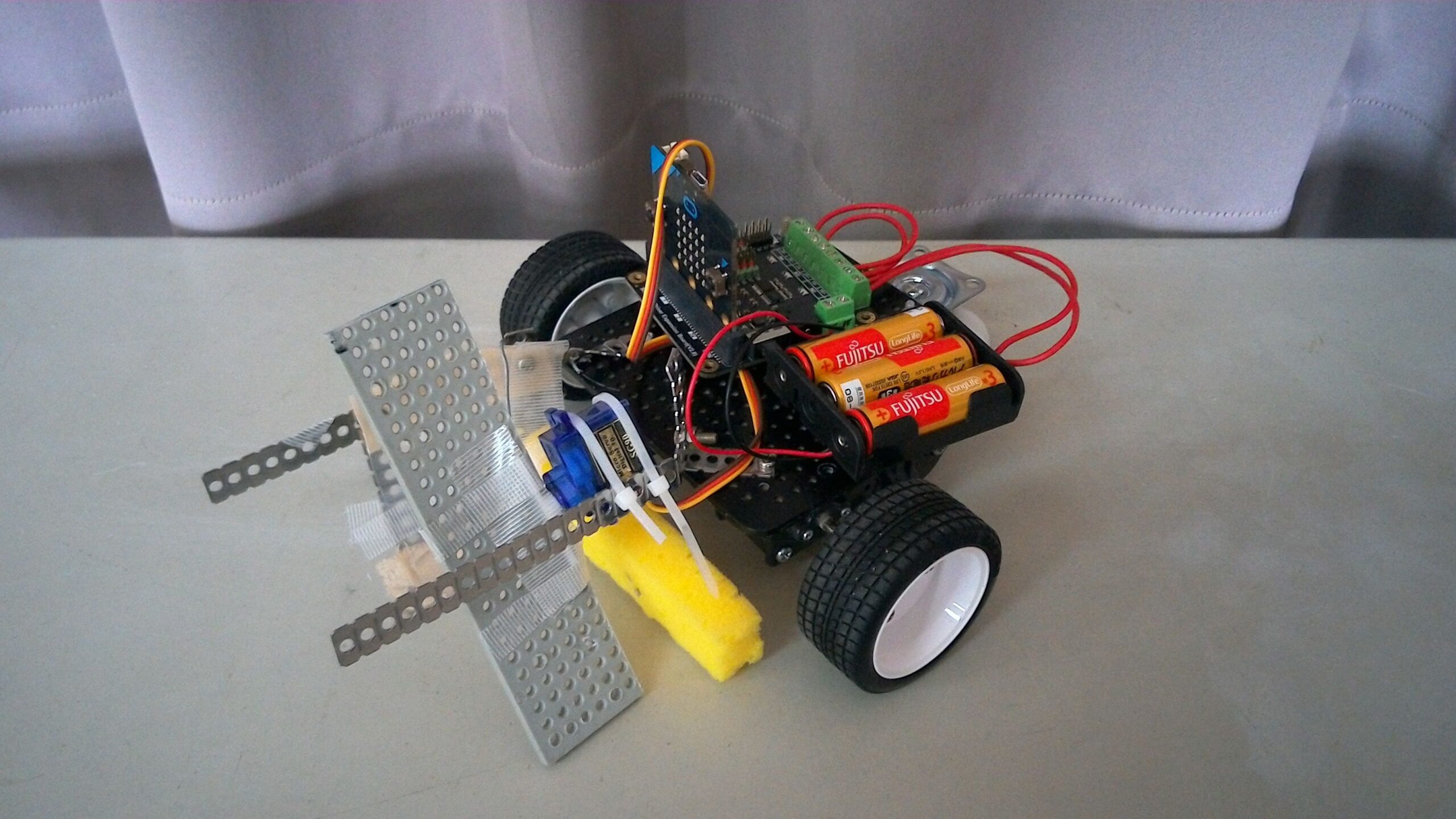
<第1案>
横から、アームを滑り込ませ、取り込む。
↑
アイテムがうまく取り込めず、失敗
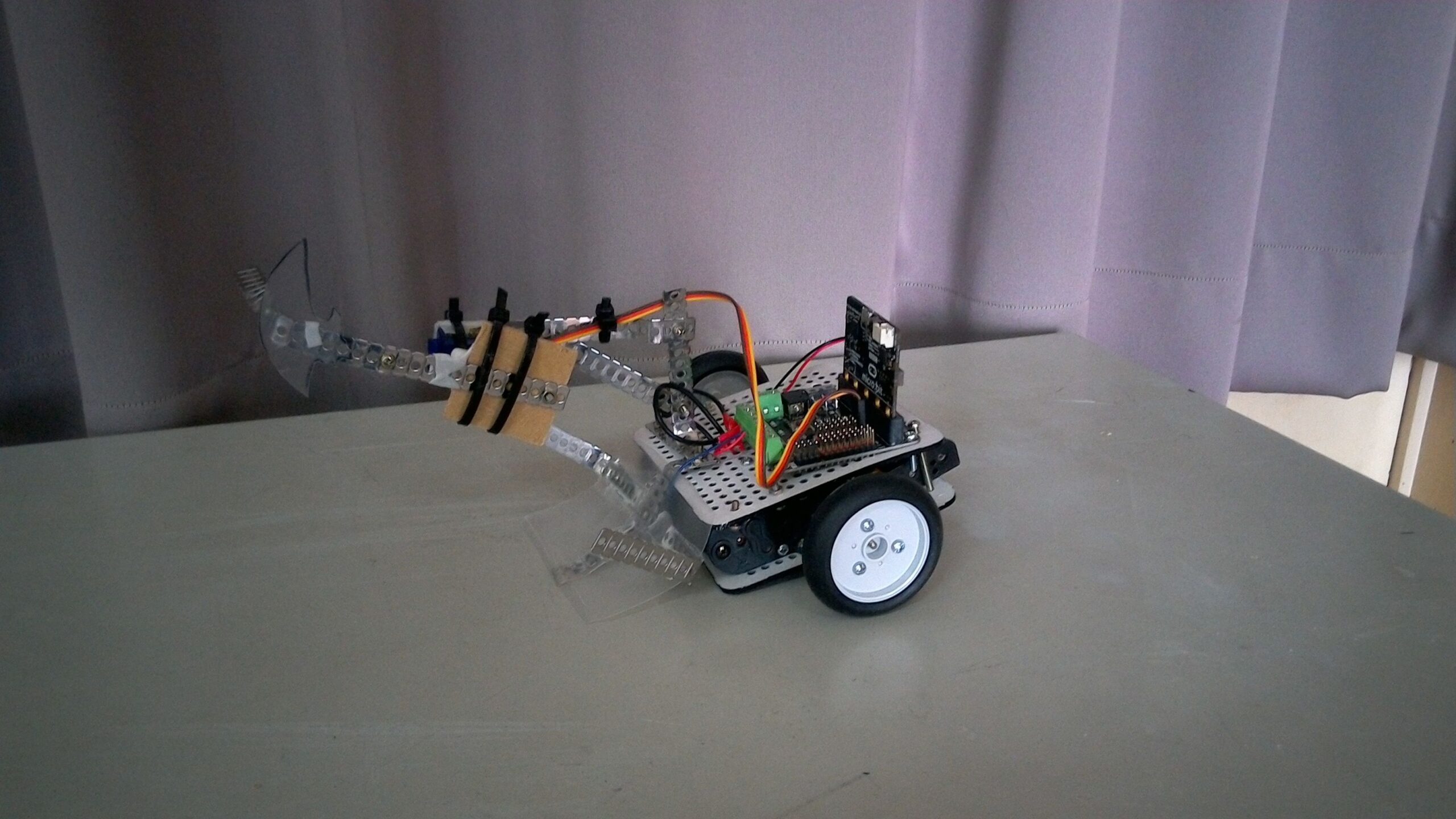
<第2案>
上方から、アームですくい上げるよう取り込む。
↑
アイテムを即座に取り組める。現在の機構

<プログラム>
プログラムは、コントローラと機体で分け、無線を送信する側と受信する側で、別のものを使用した。送信は数値で行い、コントローラの角度で、四方向の可動を実現した。スピード調節は一段階でしか設定していないので、繊細なロボットコントロールが必要となる。

これらアームの機能はサーボモーターを使用しており、一回の動作で入力した分停止するというもので、ウォームギアに似ている点がある。ただし、固定される分、そこで電力がずっと使用されるため、移動速度が低下するということもある。
亜空間カルシウム(部内プログラミング遠隔操作ロボコン)

コメント
動画を見ていると下のプラスチックが挟まっているので挟まらないように何か工夫を施した方がいいと思います
あとアームについてですが木材をおろす時にどうしても車体を動かして下ろさなければ行けないと思います なのでプログラムでおろす時アームを一回転しておろす仕組みにするといいと思います