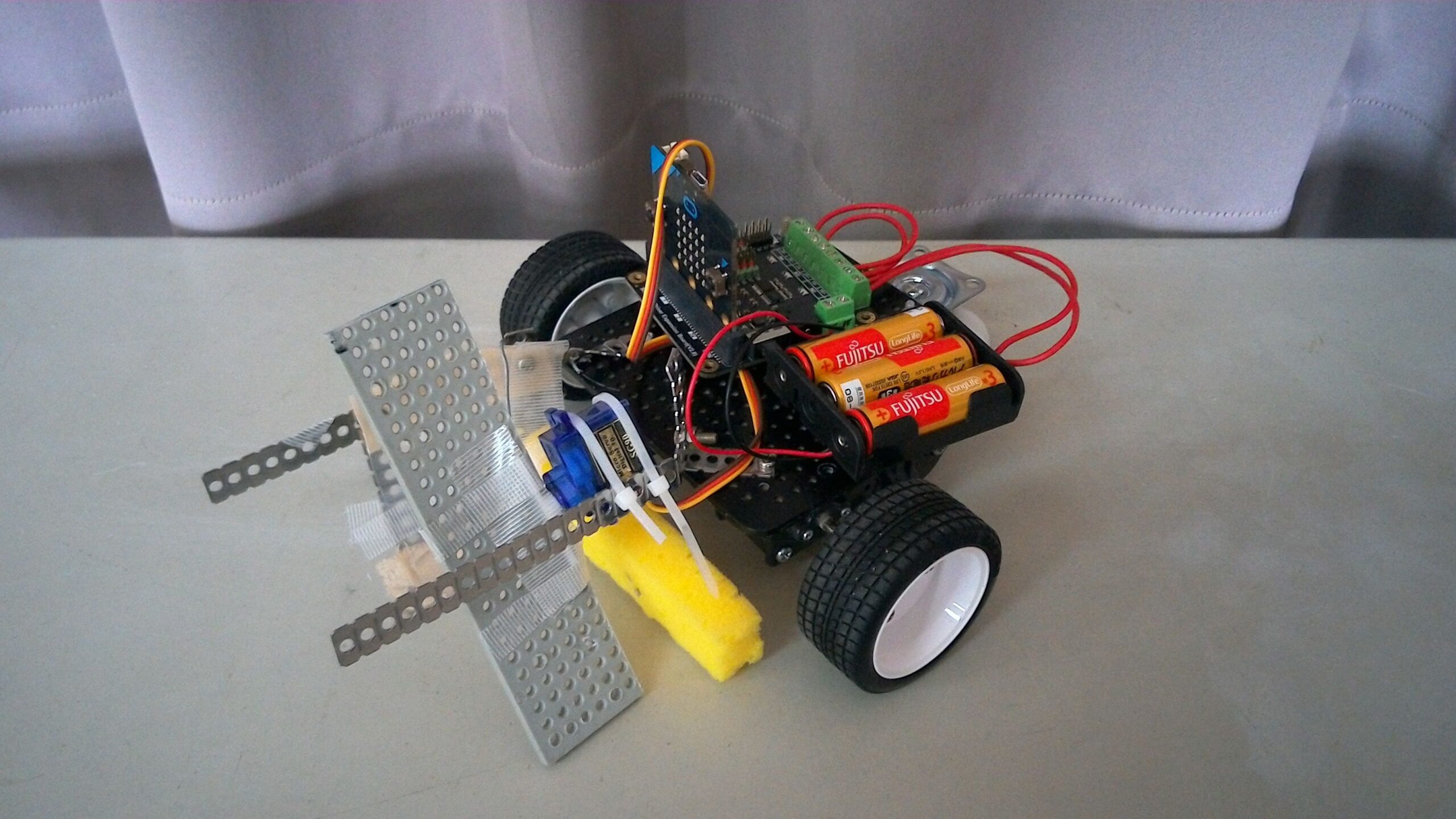
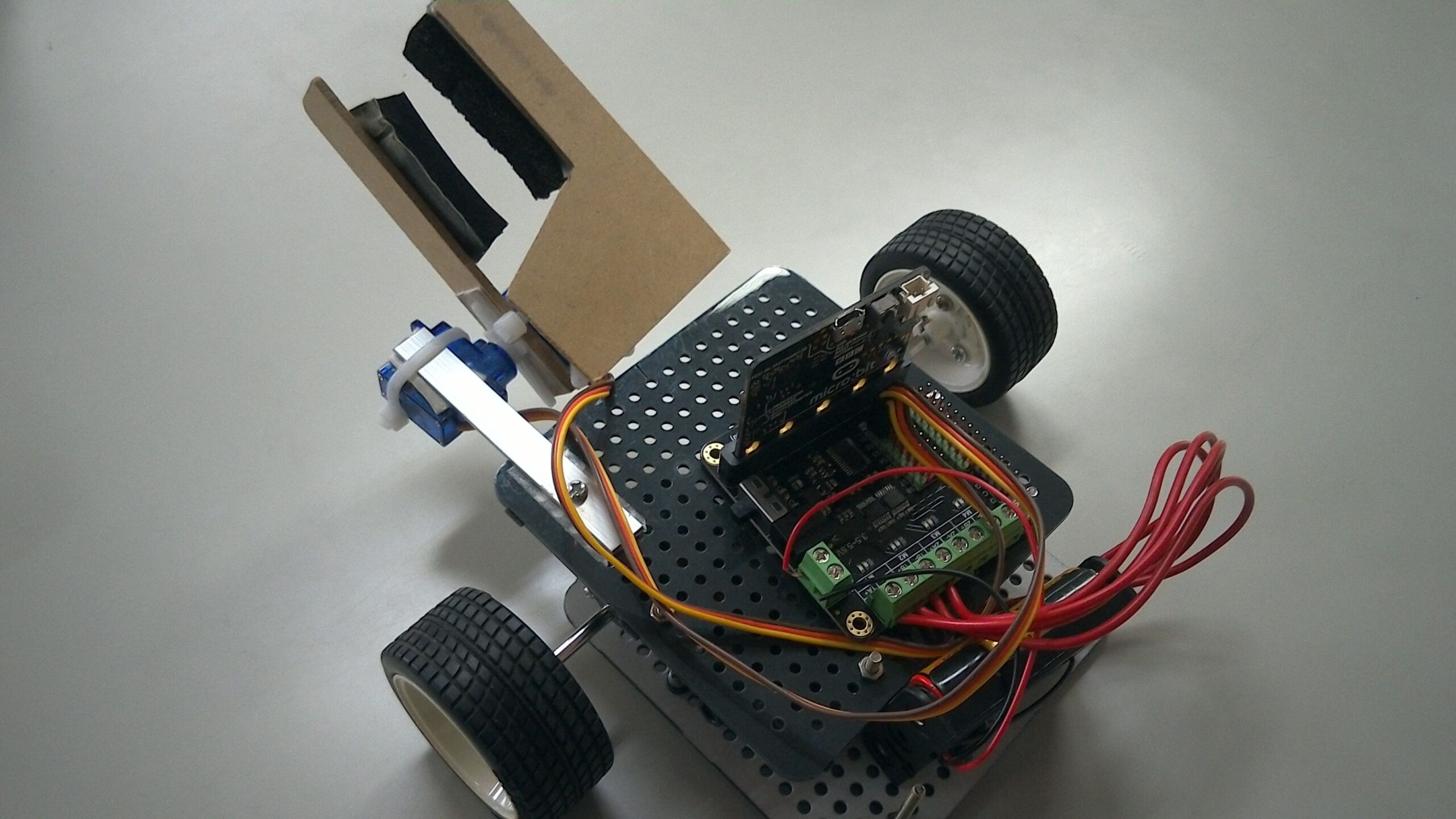
①車体を最大限小さくした。
・他の班とは違く車体を最大限小さくしました。このようにすることでアームに使える範囲を大きくすることができ、アームの性能が上昇しました。
②アームの性能を上げた。
・最初はアームの部分をスポンジにしていましたが、柔らかいので作業効率が悪く上手く持ち上がらないという欠点があるのでプラスチック型のアームにしました。また、アームの幅が広かったので木ブロックを持てるギリギリの幅で行いました。なぜこうしたかというと、端の部分が支えにくいためです。
③プログラミング
・表の①と②を見てください。①はロボットの機体を動かすプログラムで②はコントローラーのプログラミングです。このプログラミングではコントローラーを指定の向きに動かしたりボタンを押したりすることで機体のプログラミングへ無線で数値を送信し機体側が受け取り、機体側が数値によって違う動きをするようになっています。

らいみょんSKO(部内プログラミング遠隔操作ロボコン)
コメント
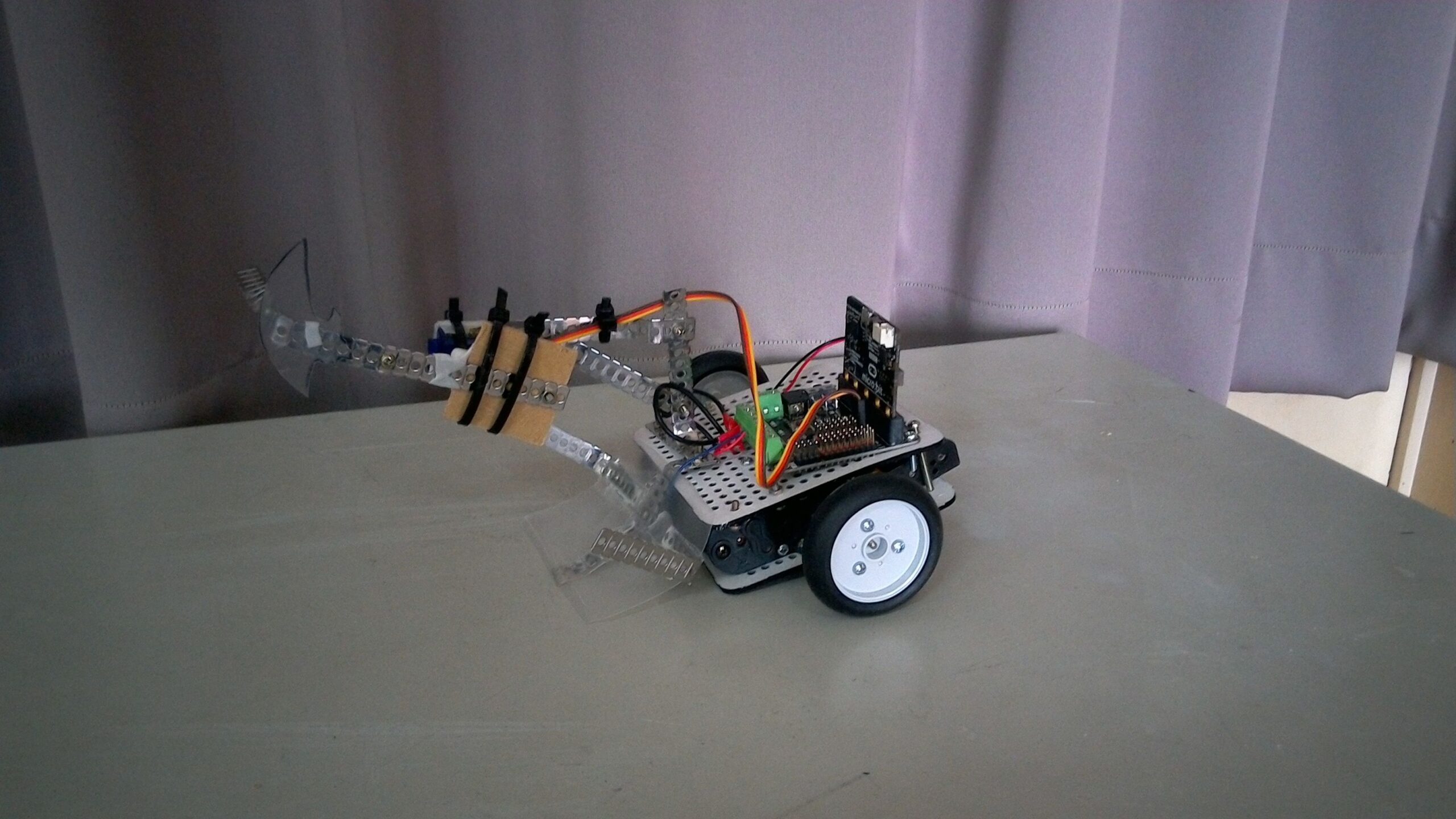
動画を見ていると車体が動くと傾きながら動いているので速度がゆっくりでもいいので傾かないように微調整して見るといいと思います
あとアームのプラスチック板を広くしてアームの支柱を平行にして木材を落ちないようにしてもいいと思います