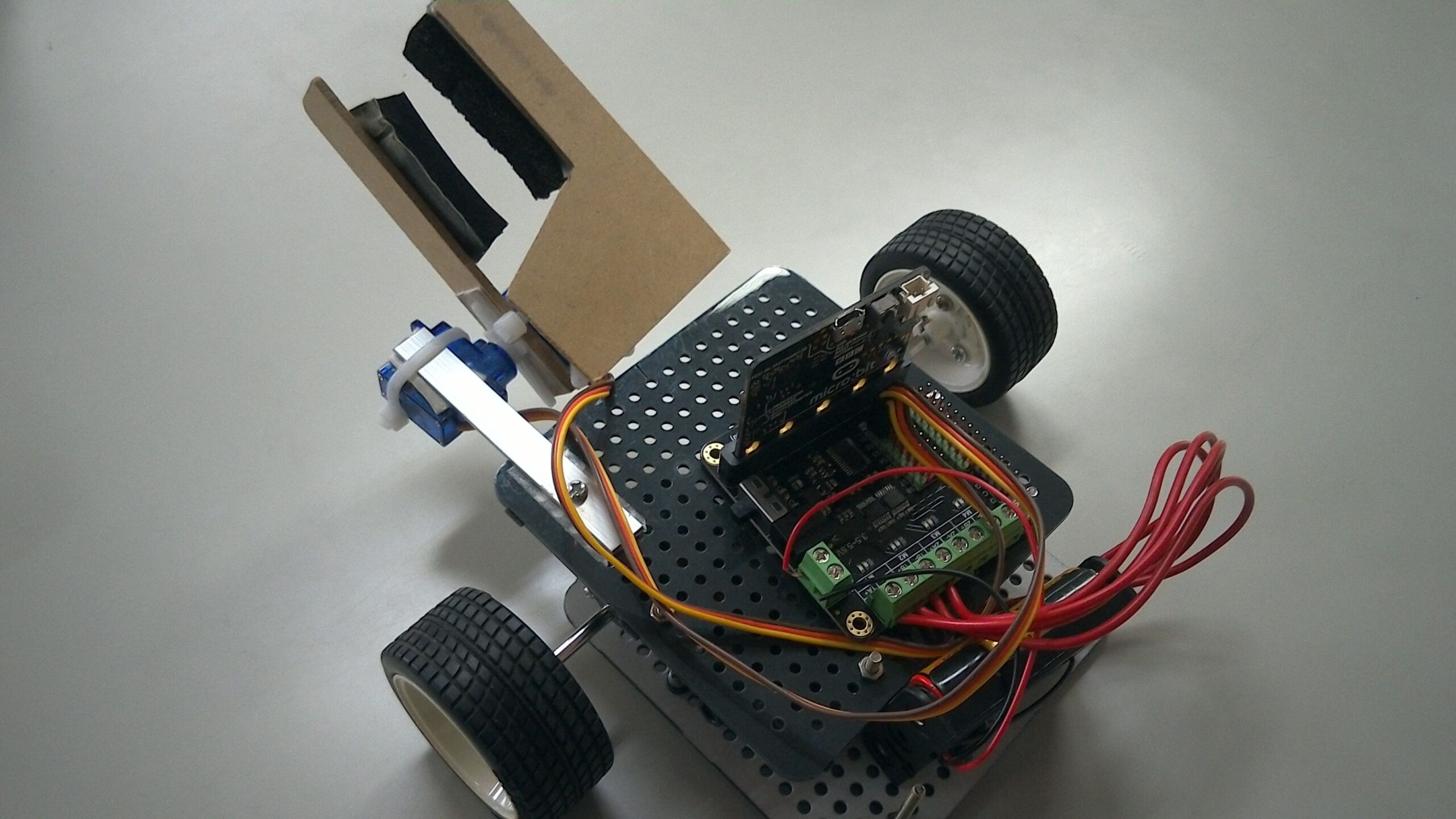
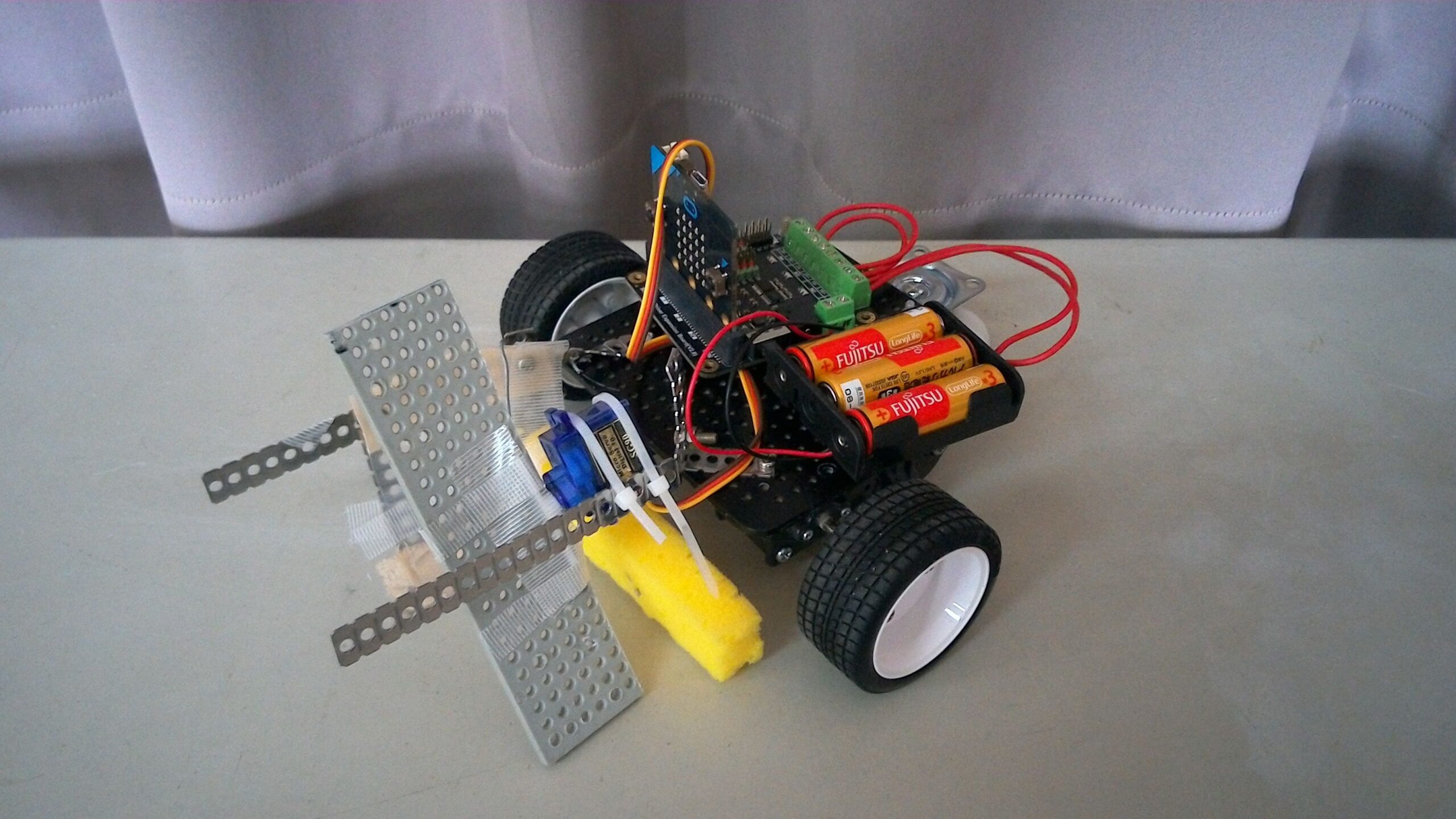
私たちのチームのロボットは、アームでブロックをつかむ機構にしました。先端についてる滑り止めがブロックを落とさないようにつかめるようになっており、それでブロックをつかんで運ぶことができるようになっています。
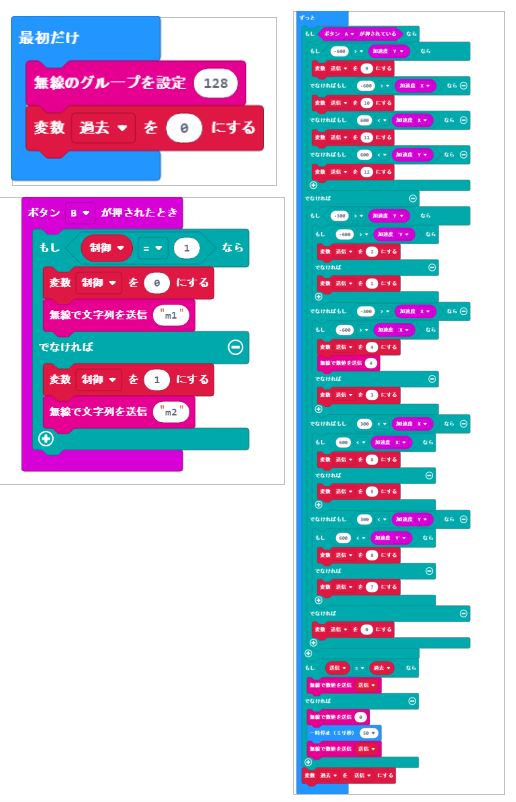
<プログラム>
前に進むためにはコントローラーを下に傾けるとゆっくり前に進み、Aボタンを押すと加速して前に進みます。傾けると右や左に曲がり、自由に進ことができます。同様にAボタンを押すと回転でも加速するようになっています。ブロックをつかむにはBボタンを押すことでブロックをしっかりとつかむことができます。

それいけくまちゃん(部内プログラミング遠隔操作ロボコン)
コメント
動画を見ている限り車体の動きもアームの動きも安定していると思います
アームに着いているゴムを少し伸ばしてみると掴む範囲が増えると思います