 谷田部東中
谷田部東中 僕たちのロボット
(制御部門)アームと車体
⇩これが僕たちのアームです。
ボールを入れたらプログラミングで傾けてで落ちないようにしたいです。
ガムテープだけではなくちゃんとビスで固定してます。
⇩これは車体です。車体は細いので障害...
谷田部東中 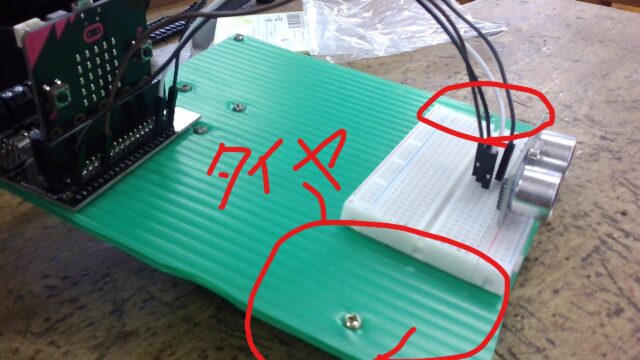 谷田部東中
谷田部東中  谷田部東中
谷田部東中 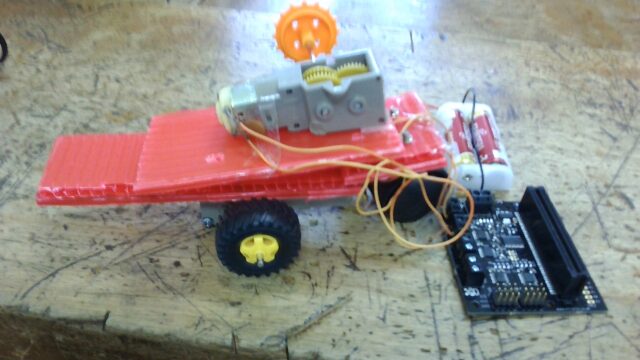 谷田部東中
谷田部東中  谷田部東中
谷田部東中  未分類
未分類  谷田部東中
谷田部東中  谷田部東中
谷田部東中  谷田部東中
谷田部東中 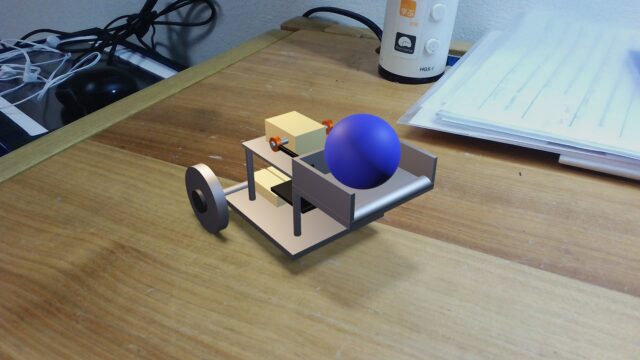 谷田部東中
谷田部東中