
ケイザムアースHのアームの試作が完成しました。
先日のオンラインロボコンでの説明ではあまりに分かりにくかったかと思われます。
ということで、アームの試作品がどのようにシュートを行うのかの動画を載せておきます。
※雑音が目立つので音なしで見るのをお勧めします
※アイテム縦にするところが思いっきり人力ですが、そこのところは大目に見てください。
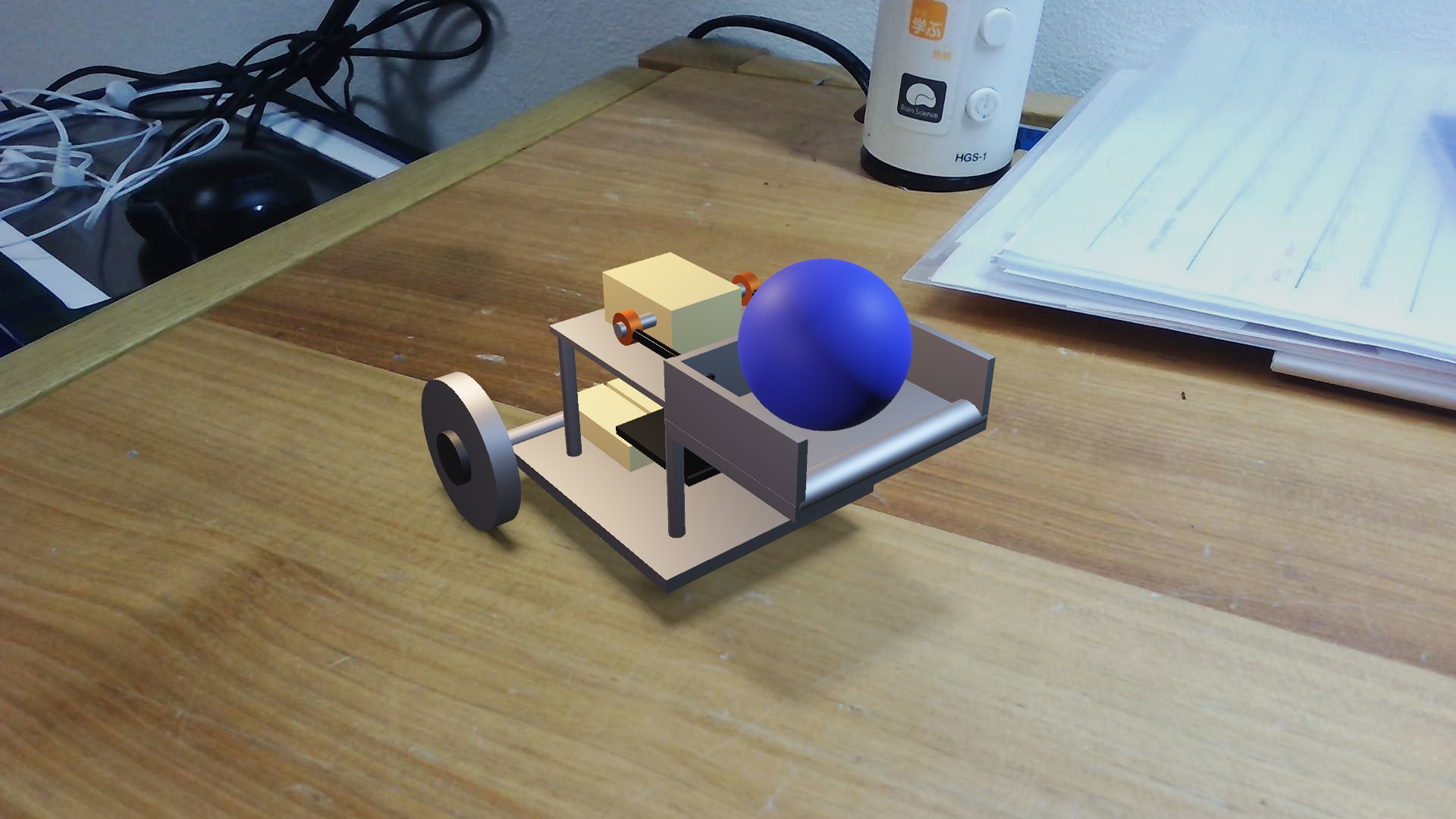
このように、アームは単調な棒と滑り止めで構成され、挿して上昇させつつ下を向かせる
(この仕組みは後日作成、下に向けてから上げるか、上げつつ下を向かすかで選考中)ものになっています。意外にパワーがなくてもシュートに成功できたので、あとは上昇させる仕組みを考えることを最優先します。
もし何かアドバイスがあれば、コメントしていただけるととてもありがたいです。
今後とも、私共 ケイザムアースH をよろしくお願いします!
ケイザムアースH動画1

コメント
今回のロボットでは、ラダーチェーンで上下させる仕組みを考えています。
モータが一つ余るので、向きを変えるのに使うか上下機構を1つ増やすかで考えています、
もしあればその点もアドバイスお願いします。
ちなみに現段階でのロボットの名前は
「29式」です