

Micro USB です。前回からの変更点と問題点について説明しようと思います。
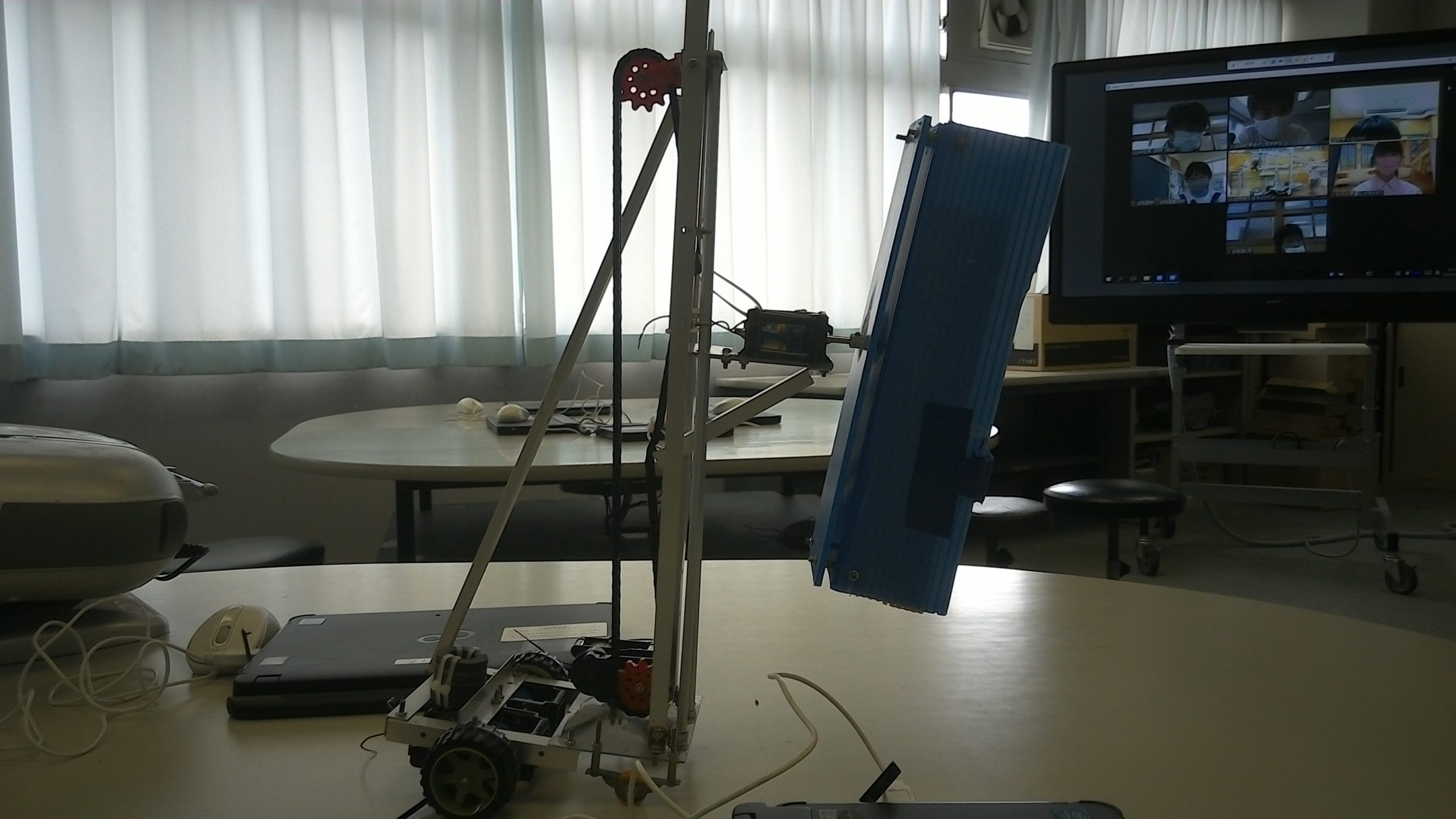
前回から『アームを持ち上げる部分にガイドを追加』、『ロボットが倒れないように重りを追加』、『アームの取り付け』、『モーターをすべて新品に交換』を行いました。
また、問題点として『ラダーチェーンの駆動用モーターのギア比が低いので缶を持ち上げると勝手に下がってしまう』のと、『重りをつけても重たい缶を持ち上げると前に倒れてしまう』という点です
以上で説明はおしまいです。次の第6回ロボコンオンライン会議でお会いしましょう。ではでは(‘ω’)ノ


コメント