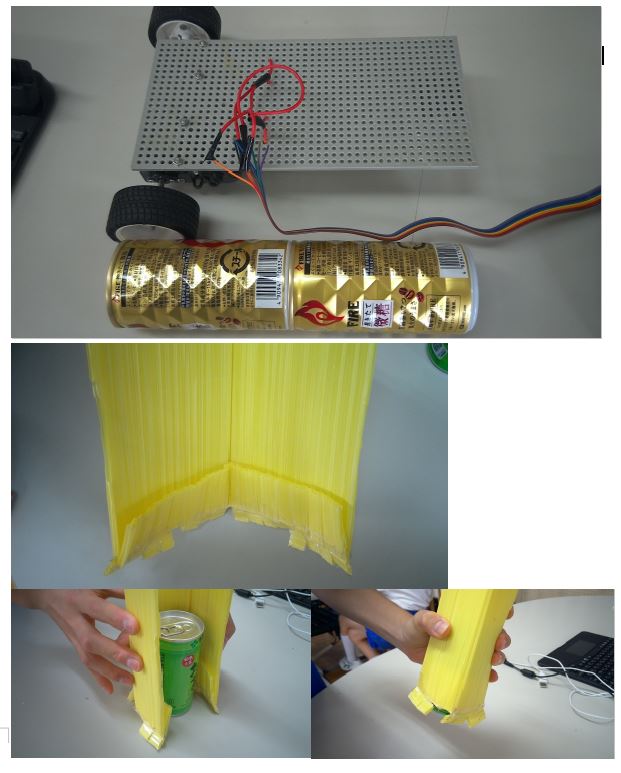
まず1つ目の進展は走るようになったことです。このことでロボットの速さや動きも分かったので調整をして動かしやすくしたいです。
2つ目はリモコンの銅線を付け替えたことです。今回のロボコンではロボットを動かす範囲が狭くなっているのでリモコンの銅線が長くても動かしにくいだけだとおっもたので付け替えました。
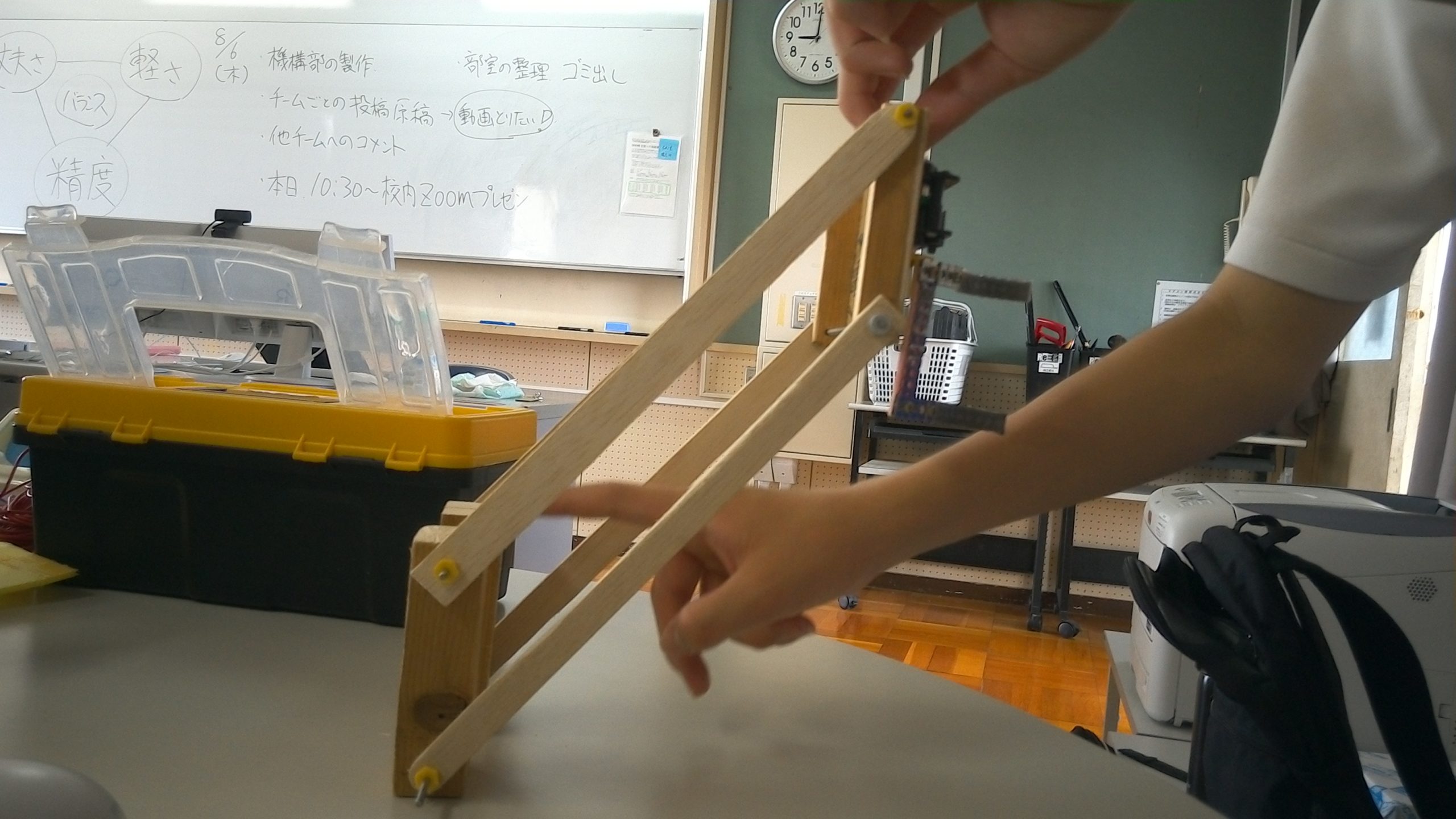
3つ目は、缶を持ち上げる機構 並行クランクの素材をアルミL字金具にしたことです。前回は木材だったのですが木材では、少し重くグラグラしていたのでアルミにしました。
以上が前回からの進展です。

大穂中まず1つ目の進展は走るようになったことです。このことでロボットの速さや動きも分かったので調整をして動かしやすくしたいです。
2つ目はリモコンの銅線を付け替えたことです。今回のロボコンではロボットを動かす範囲が狭くなっているのでリモコンの銅線が長くても動かしにくいだけだとおっもたので付け替えました。
3つ目は、缶を持ち上げる機構 並行クランクの素材をアルミL字金具にしたことです。前回は木材だったのですが木材では、少し重くグラグラしていたのでアルミにしました。
以上が前回からの進展です。
コメント
交流会の方でも言いましたが,アームの機構がとても参考になりました。
車体バランスを取るために!
3+1=4 → 1+3=4