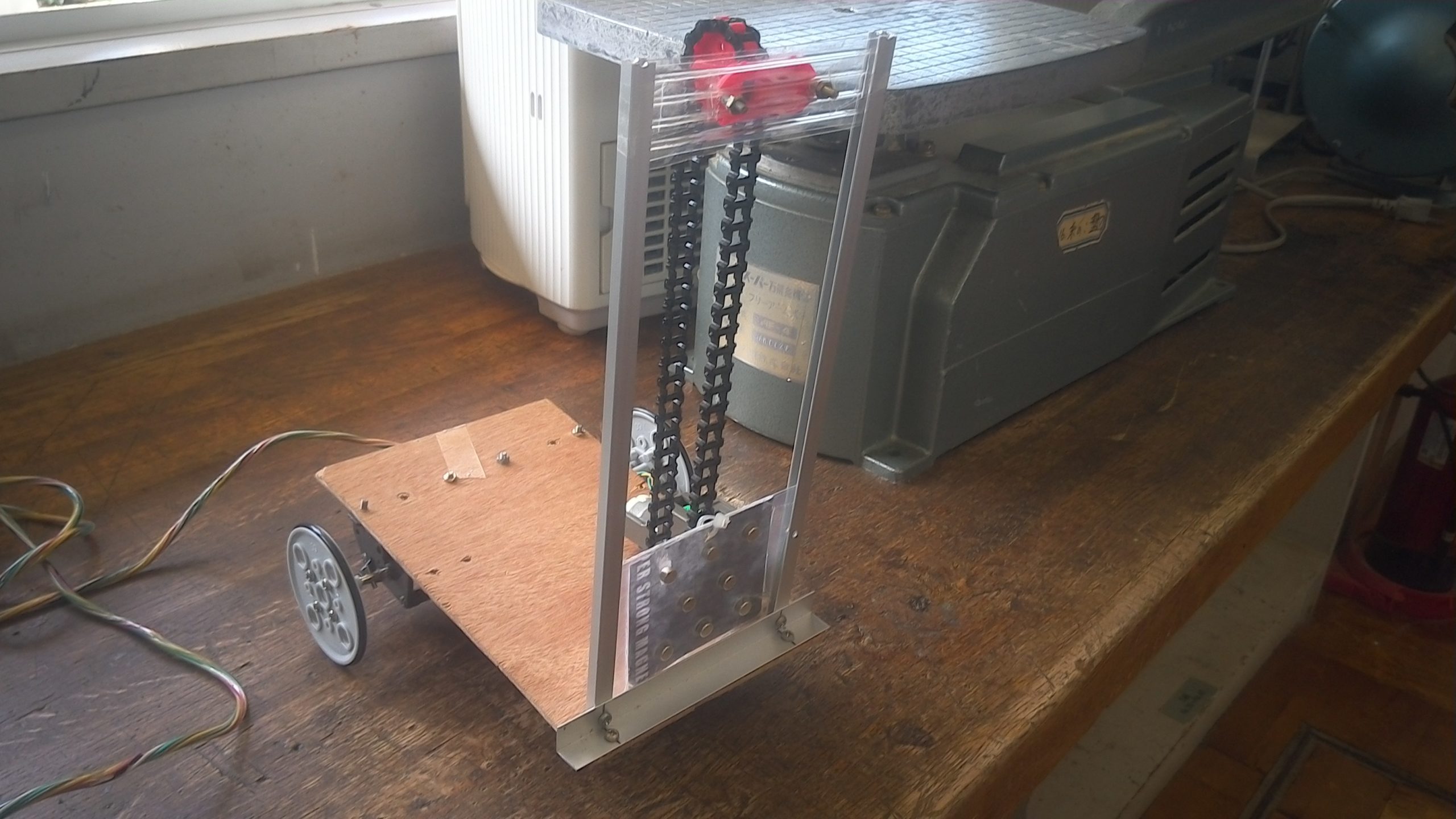
これが、私たちのロボットです。ラダーチェーンは、支柱2本と、斜めのバーで支えており、アームは上下の運動に加えて、左右に回転する機構も備えています。また、ロボットが前に倒れないように、重りも後ろにつけました。さらにロボット本体は、アルミでフレームを作っているので、軽量化を実現しています。

谷田部東中これが、私たちのロボットです。ラダーチェーンは、支柱2本と、斜めのバーで支えており、アームは上下の運動に加えて、左右に回転する機構も備えています。また、ロボットが前に倒れないように、重りも後ろにつけました。さらにロボット本体は、アルミでフレームを作っているので、軽量化を実現しています。

コメント
どのようにして缶を掴むのですか?
アームでどのように缶をつかむのですか。