
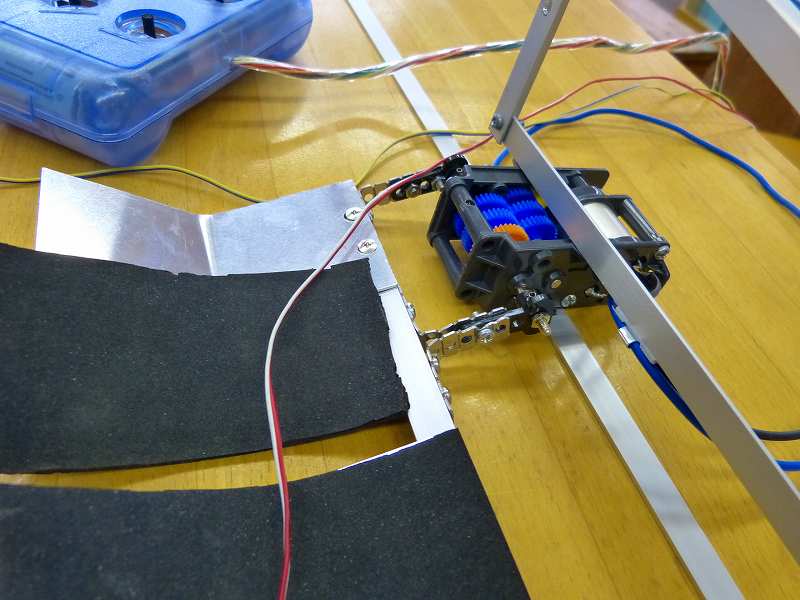
並木中「ベテルギウス2」です。現在は,車体とアイテムをつかむ機構を作りました。
車体は,幅が広い感じがしますが,なんとかアイテムにぶつからずに教科書からおりられます。車体の中央には,配線をまとめて付けることができるものを取り付けました。
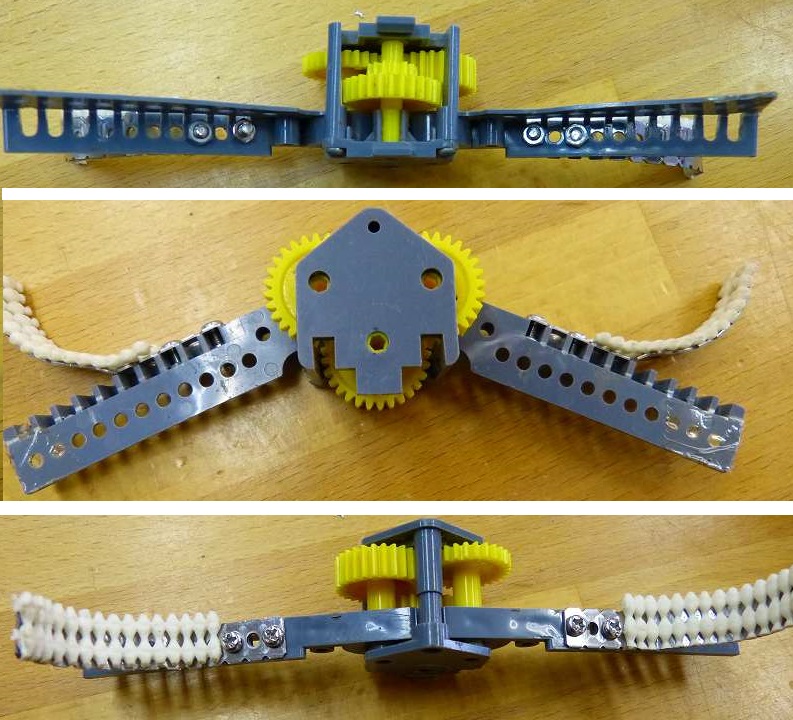
アイテムをつかむ機構ですが,写真の赤い部分は,プラスチック段ボールの片面をカッターでたくさん切り込みを入れ,アイテムを包み込むように丸められるようにしたものです。これにたこ糸を取り付け,巻き取ることでアイテムをつかみます。しっかりとつかむことができ,中身の入ったアイテムもつかむことができます。


コメント
プラスチック段ボールのところに返しをつけると、缶が1度入るとモーターで開けるまで落ちてこないと思います。
このアームでは、1回につき何個まで、缶を持ち上げる事が出来ますか?
基本的には1個つかんで,次の缶の上に積み,2個重ねた缶をつかみ,3個めの缶の上に積み,3個重ねた缶をつかんで最後の缶の上に乗せるということができると考えています。つかむ強さは問題ないのですが,4個重なった缶から,この赤い機構を抜き取るので,とても高さが必要になるのが課題です。
紐でしめる方法が
参考になりました。
ありがとうございます。
つかむことはできますが,これからこの機構を上下に動かすことが課題です,
交流会でも言いましたが、僕達がペットボトルで試しましたができなかったのでとても参考になりました
コメントありがとうございました。また,交流会でもお話ができてよかったです。
缶は直径が小さいのでできたのだと思います。
プラスチック段ボールの片面を切ってまるめる方法は,以前,アイデアロボットコンテストのときに,先輩がためしていたものです。
アームの動き方がユニークで参考になりました。
コメントありがとうございました。
缶に巻き付けた方が,滑らないでつかむことができると考えて,この仕組みを思いつきました。この機構は上下して缶をつかむので,上下させることがこれからの課題です。