


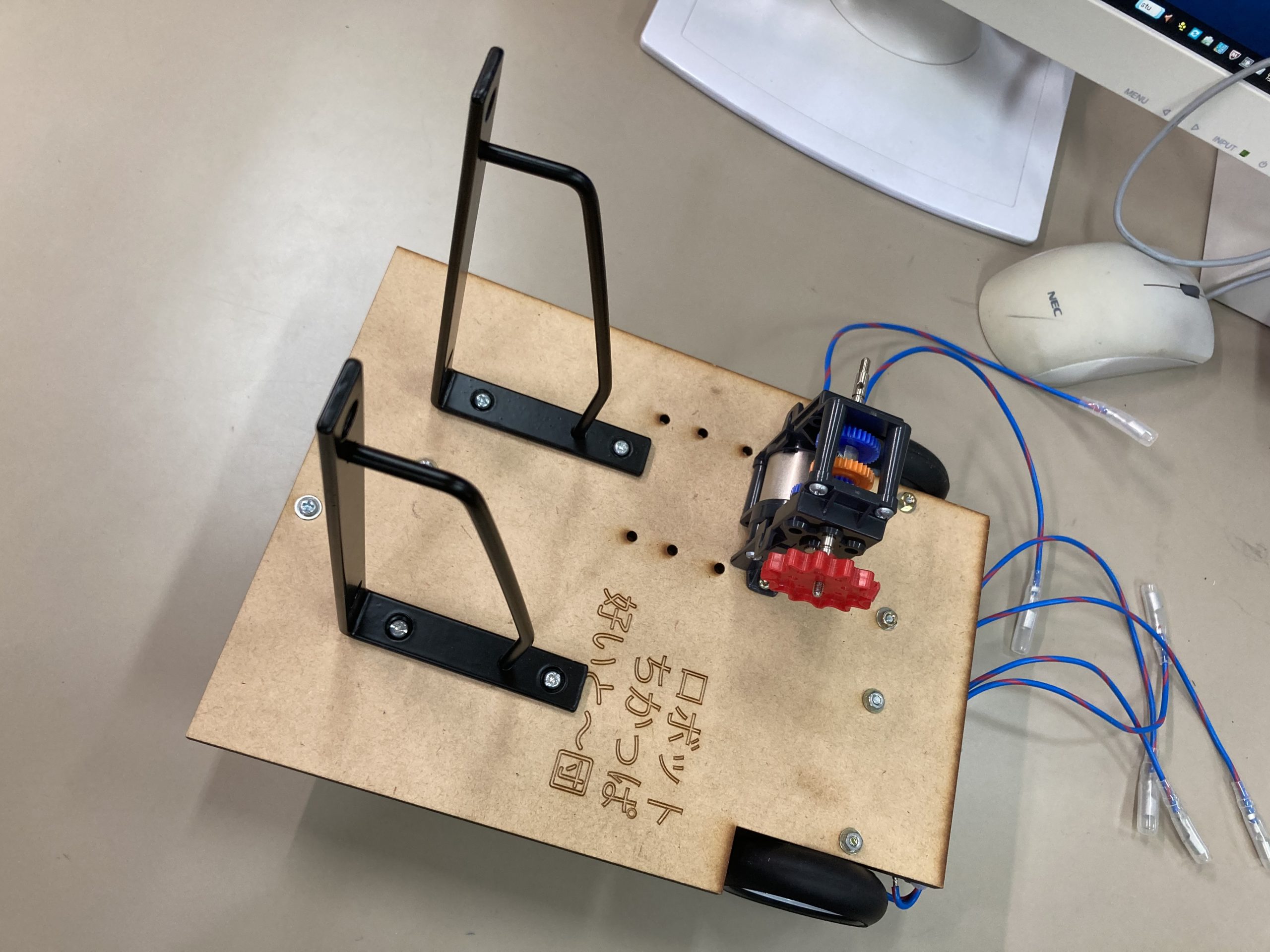
L字棚受けをシャーシに2つ立てました。棚受けにはアルミアングルを固定します。その間にプーリーをつけ、プーリーにアームを固定します。そして、6速ギアボックスとプーリーにラダーチェーンを取り付けます。6速ギアボックスが回るとプーリーも回り、固定されたアームも上下する仕組みになっています。
 博多中
博多中
L字棚受けをシャーシに2つ立てました。棚受けにはアルミアングルを固定します。その間にプーリーをつけ、プーリーにアームを固定します。そして、6速ギアボックスとプーリーにラダーチェーンを取り付けます。6速ギアボックスが回るとプーリーも回り、固定されたアームも上下する仕組みになっています。
コメント
アーム部分にプーリーを使うのですね。なぜモーターは6速ギアボックスを使うのでしょうか。中間のスピードどのギアを使えば安定感が増すと思うのですが。
なぜ中間のスピードのギアを使えば安定感が増すと思うのでしょうか?教えていただけないでしょうか。
スピードが速すぎると缶を掴んだり、積み上げるのが安定しなかったり、不具合が起こったりしてしまうのではないかという理由からです。ですが、博多中さんのアームを見る限り安定感がかなりあると思いますので、私たちの意見は参考程度になれば幸いです。
教えていただき、ありがとうございます。
参考にさせていただきます。
プーリーを動かす、六速ギヤボックスのギヤ比を、教えてください。
ギヤ比は、まだ決まっていません。
196.7:1
にしました。
動くことでアームが上下するのは面白い機構ですね!
しかし、実際の形を想像できないので進捗があったら
また更新してください。