どうも。チームひとりです。前回からの大きな進捗はやっと動いたくらいですが、7月末までの進捗を発表します。細かい説明は省きますので、ご了承ください。よくわからない方はチームひとりのPART2をご覧ください。
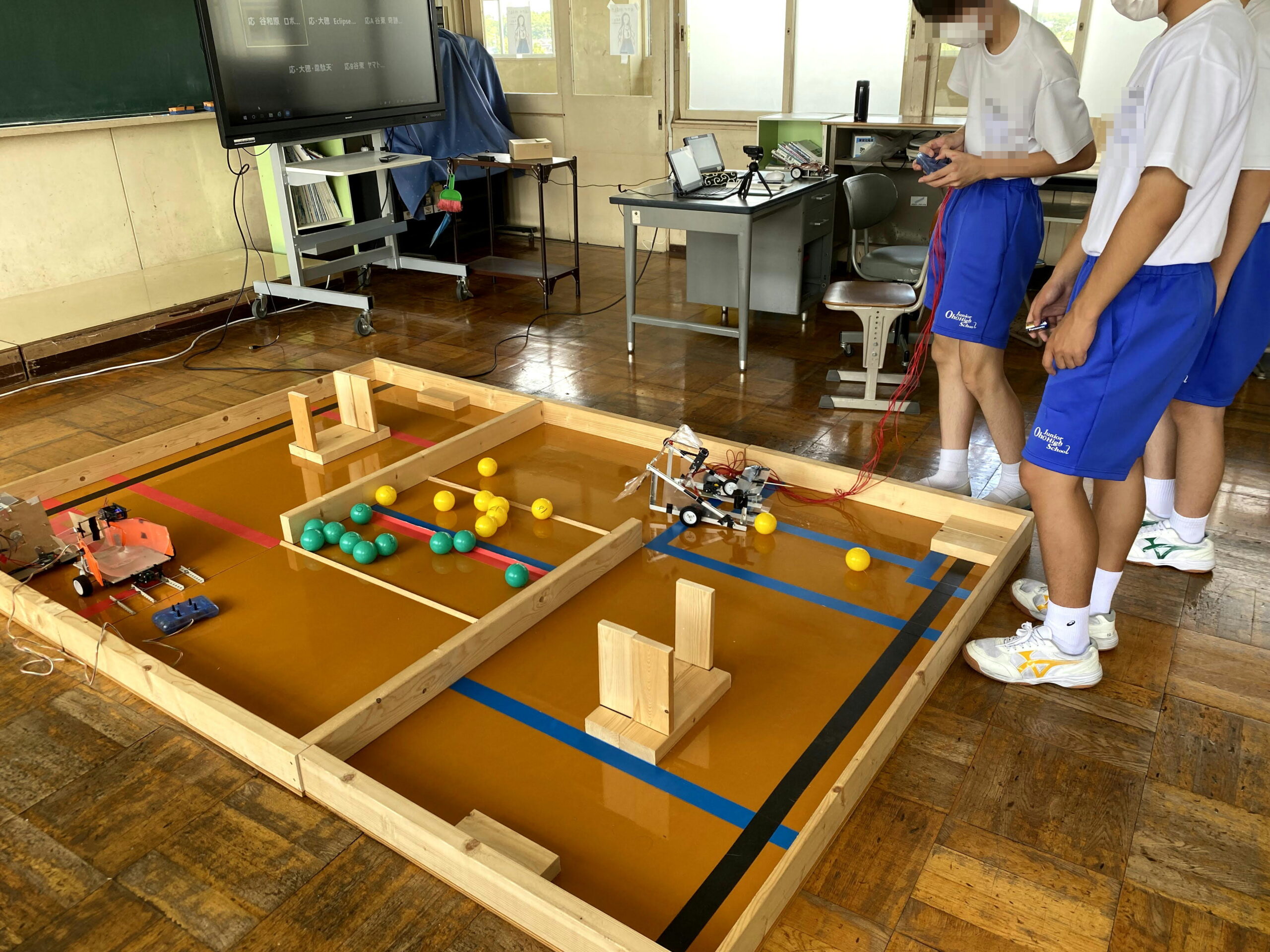
まず初めに言うのは、動きました。そして、不器用ながらアイテムを取れました。ただ、走る途中で曲がってしまうというトラブルが発生しているので、それを直そうと思います。(残念ながら動画はありません。)作戦はPART2を参照してください。

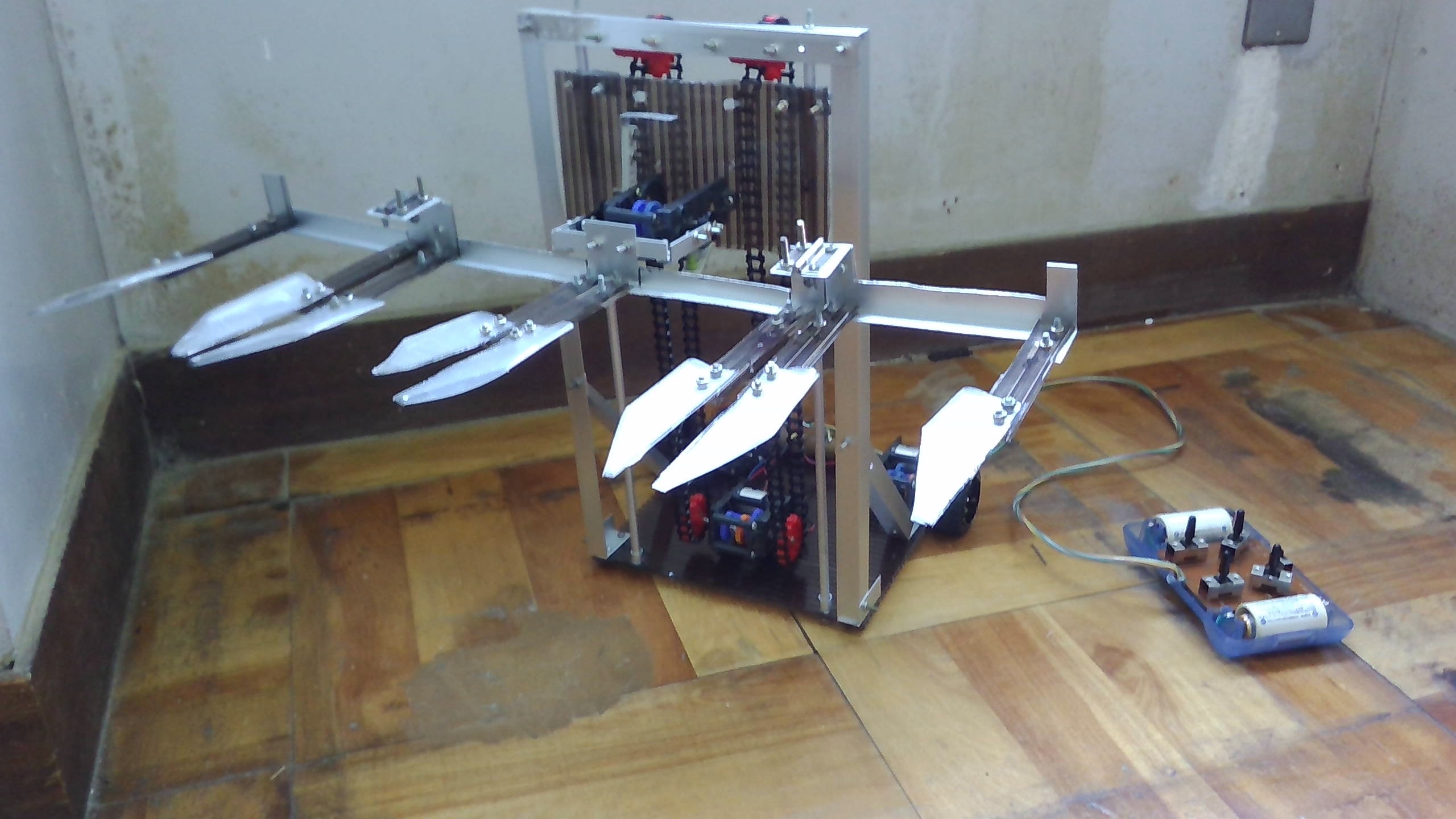
補足で言うと、モーターを変えました。左がそれです。
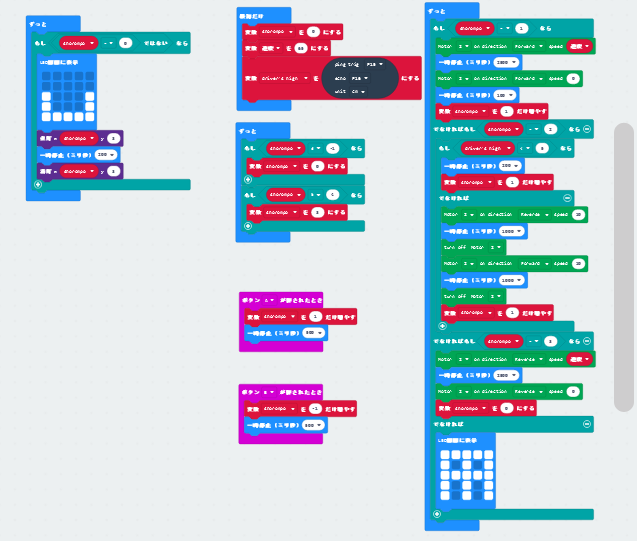
次にプログラムです。前回から大幅に変わり、工程を変数
 で操作します。前回のロボコン会議の時に見せたやつと似ていますが、結構変わっているとことがあります。例えば、AキーとBキーの両方押しによって止めるというプログラムも存在しましたが、取っ払いました。あと、ロボコン会議ではストップマークや動画サイトの再生中などのマークで進む又は止まるを表していましたが、下のプログラムで示すようにしました。右のプログラムの一番左のやつで制御してますね。
で操作します。前回のロボコン会議の時に見せたやつと似ていますが、結構変わっているとことがあります。例えば、AキーとBキーの両方押しによって止めるというプログラムも存在しましたが、取っ払いました。あと、ロボコン会議ではストップマークや動画サイトの再生中などのマークで進む又は止まるを表していましたが、下のプログラムで示すようにしました。右のプログラムの一番左のやつで制御してますね。

チームひとりは、これまで多くの先生方、他チームのアイデア(特にsyorompo+Σさんのアイデアが多い)に支えられてきましたので。できる限りの高得点を取って恩返しをしたいです。皆さん、ありがとうございます。
問題点やこうしたほうがいいというアイデアがございましたら、口頭又はコメントで教えていただけると幸いです。ちなみに曲がるトラブルの原因は解っているので大丈夫です。
コメント