射出台座
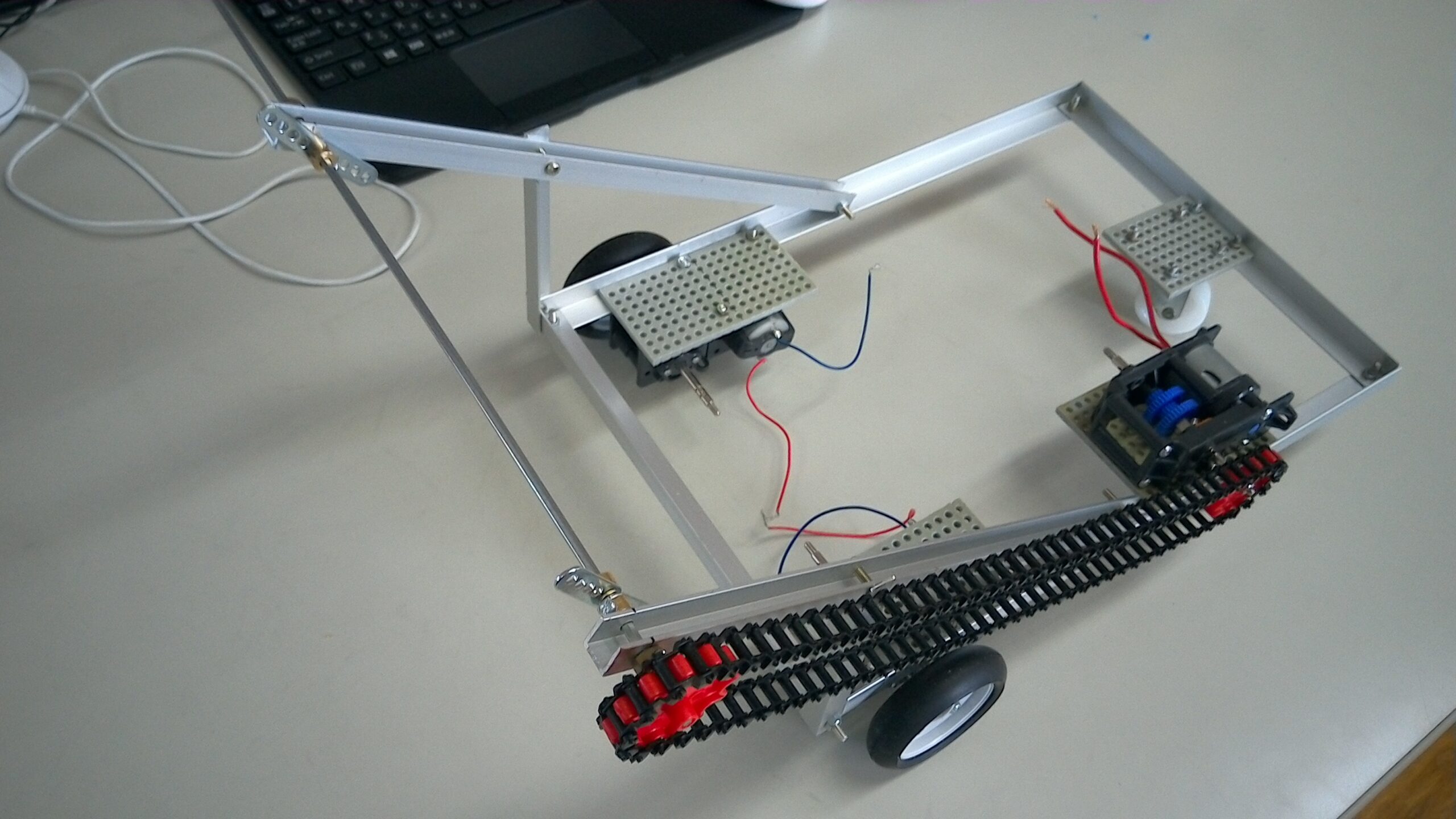
私たち韋駄天´は、水球回収ロボットを現在制作中です。(下図参照)
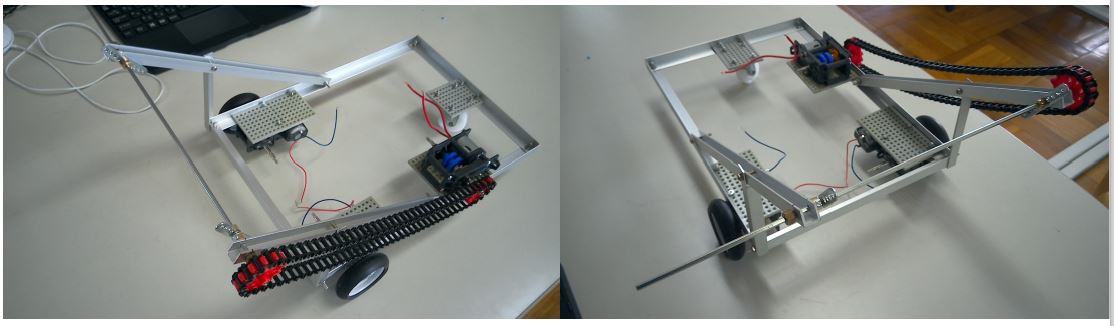
このロボットの最大の特徴として、プロペラを回転させて水球を回収するところです。プロペラ(今後取りつける予定)を回転させることによって、一度に複数個の水球を回収することができます。さらに、アングル材を使用することによって軽量化することに成功しました。軽量化したことによって機動性があがり、回収作業を素早く行うことが可能です。しかし、まだ発射台に乗せる機構ができていないことが挙げられます。
発射台は下についている六足ギヤによって360度回転式になっています。(下図参照)
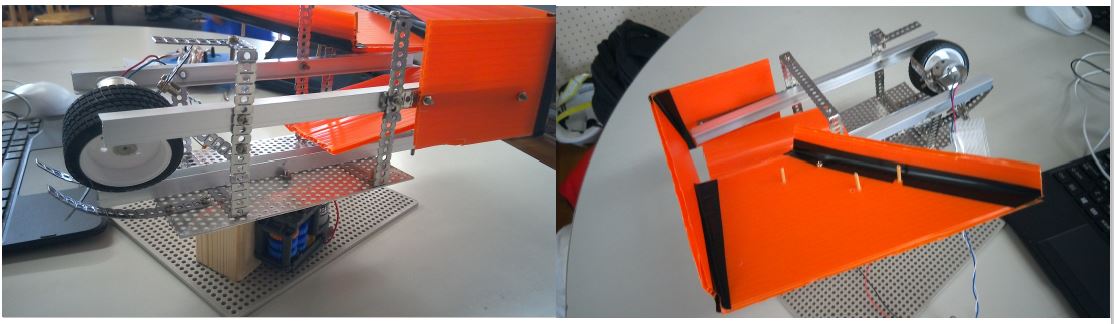
発射機構は水球回収ロボットによってオレンジ色の斜面部分に運ばれ、等加速度運動に則って自動的にセットされる仕組みです。球威のほうも問題なく、狙いも定めやすいので申し分ない性能を発揮してくれます。こちらの機構面では、現在特に問題は見つかっていない状況です。

コメント
水球を発射台に上げるのに,どんな機構を考えていますか? 楽しみですね!
発射して,命中率をあげるための工夫が必要ですね。