前回の投稿からかなり間が空いてしまいました。というか、初回投稿から何も投稿していませんでした。すみません。今回はとりあえず前回の投稿からの進捗・変化等をお見せしたいと思います。
❶足回り
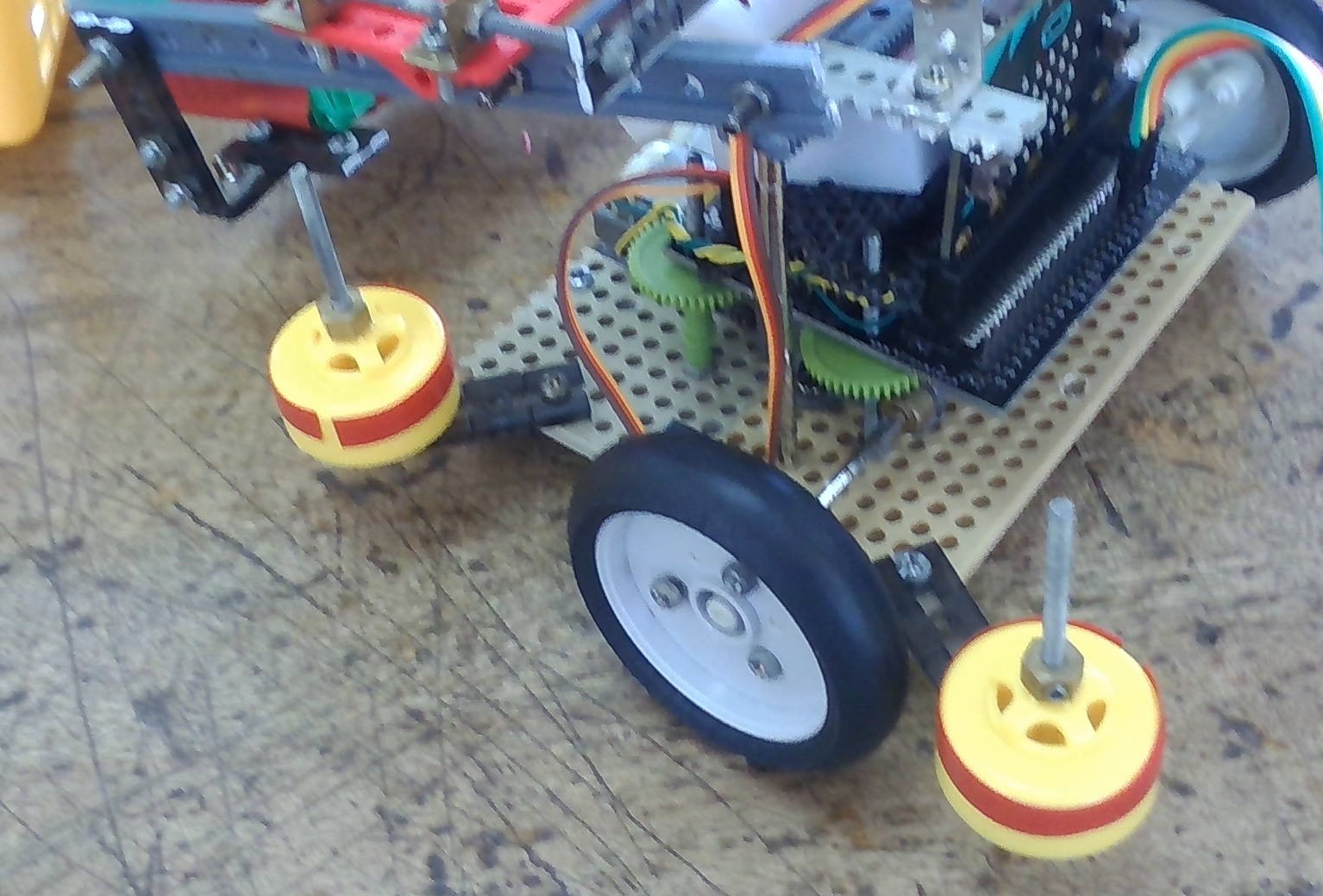
意味があったのかわかりませんが、ミニ四駆のようにローラー?をつけてみました。ただ、左右でスピードが違うモーターをどう制御するかが課題になっています。
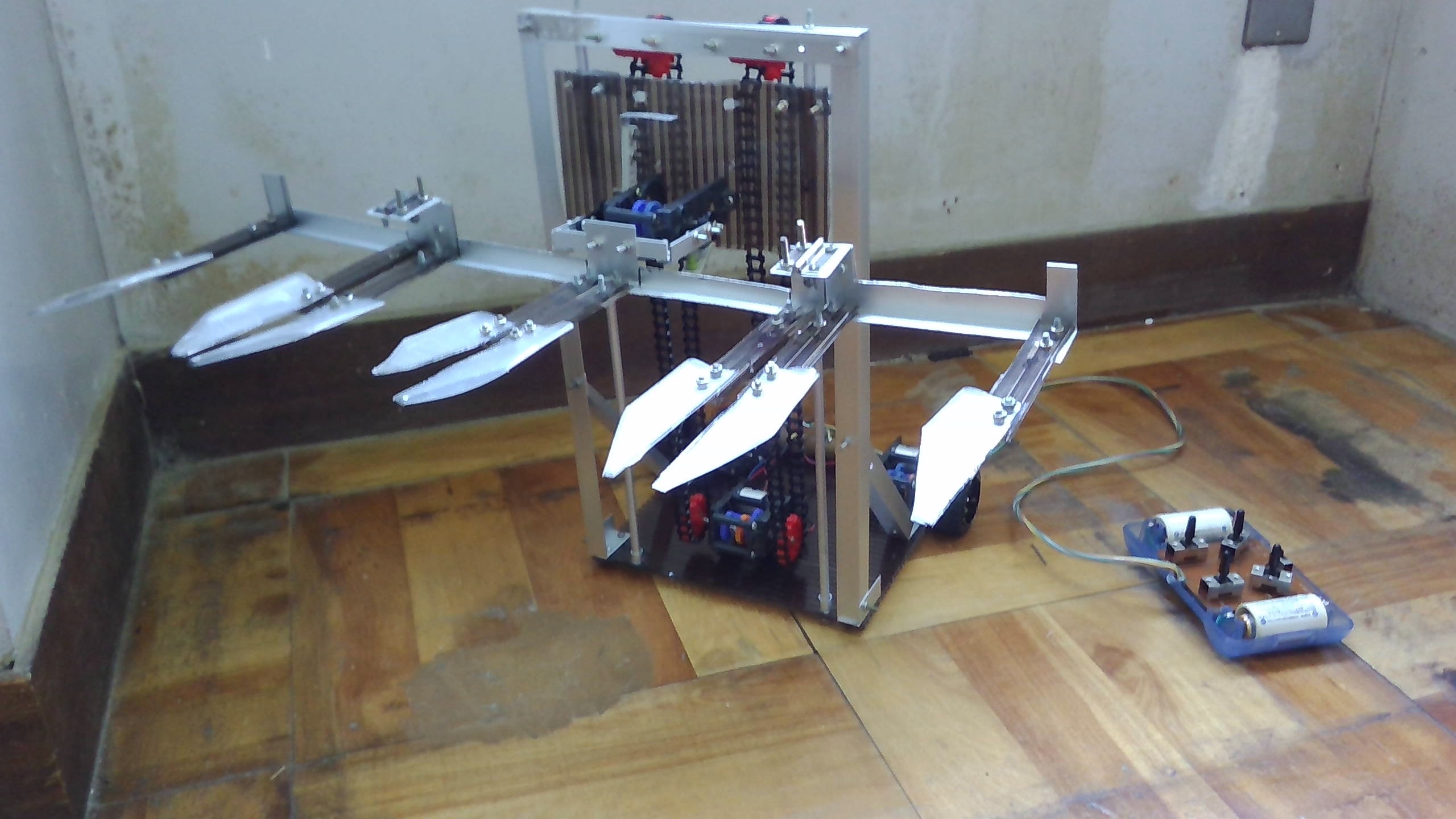
❷アーム
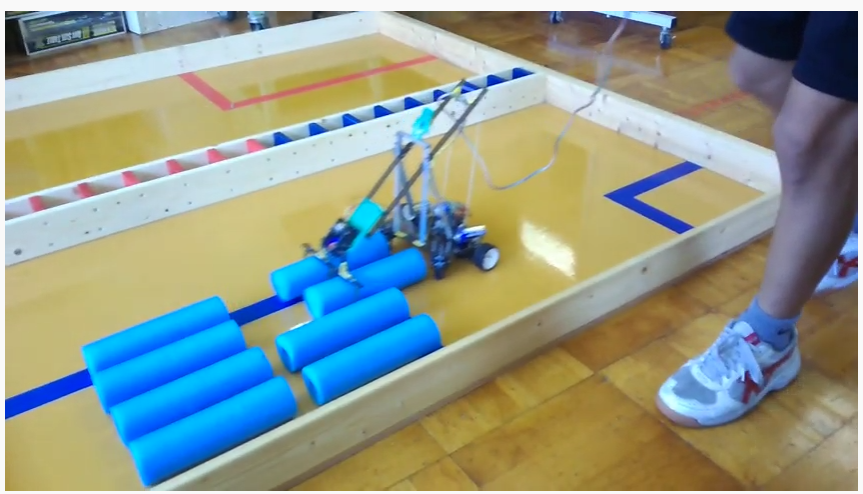
20×20×20の大きさにロボットを収めることは難しいと見たので、スタート後にアームを展開する方式をとることにしました。


左が展開前、右が展開後です。出発時にタイヤに引っかかっている輪ゴムが外れることにより展開できます。
❸センサー
僕たちのkitronik拡張ボードにはP1~P20までの端子をつなぐことができますが、プログラムの拡張機能”sonar”にはP1~P16までしかありません。そこで、JavaScripに変換してプログラムの当てはまる部分に20や19と書き込むことによって、P20まで動作させることができました。別にこんなことはしなくても動きますが、こうするとコードをきれいにできます。

左からVCC、Trig、Echo、Gndです。
1か所にまとめられています。
❹プログラム
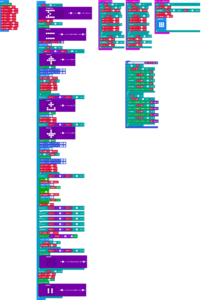
一言でいうと、ものすごく長くなりました。画像を見ればわかると思います。
コメント