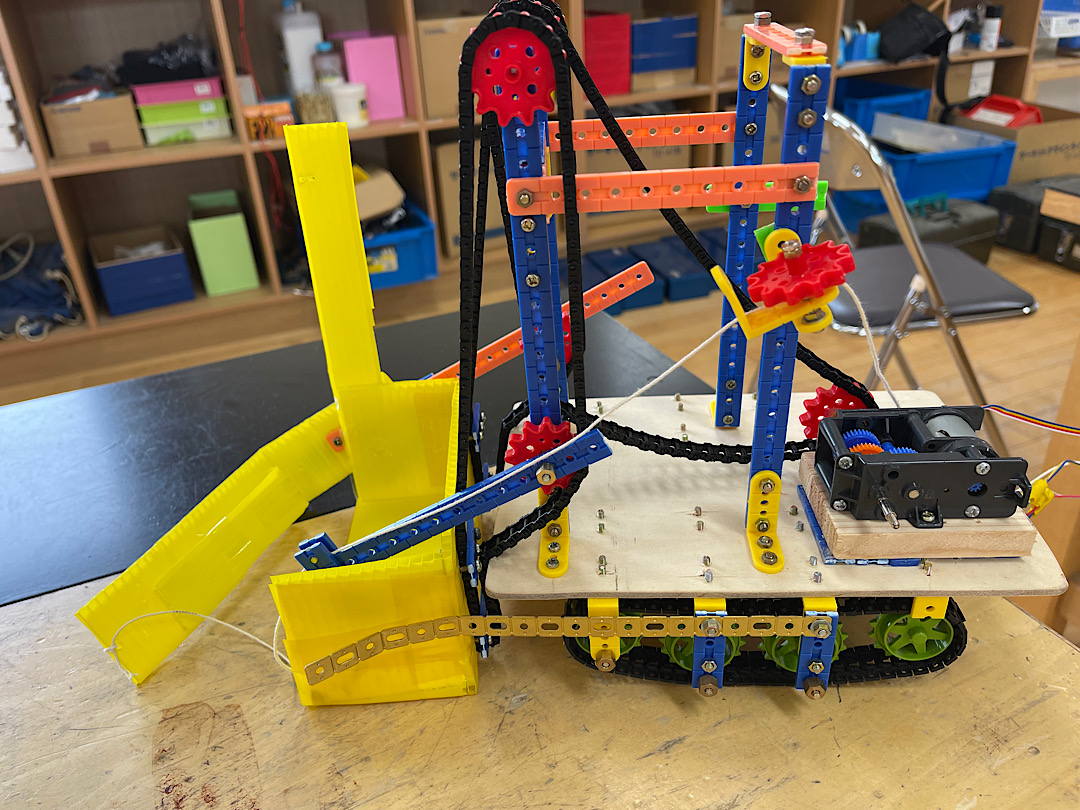
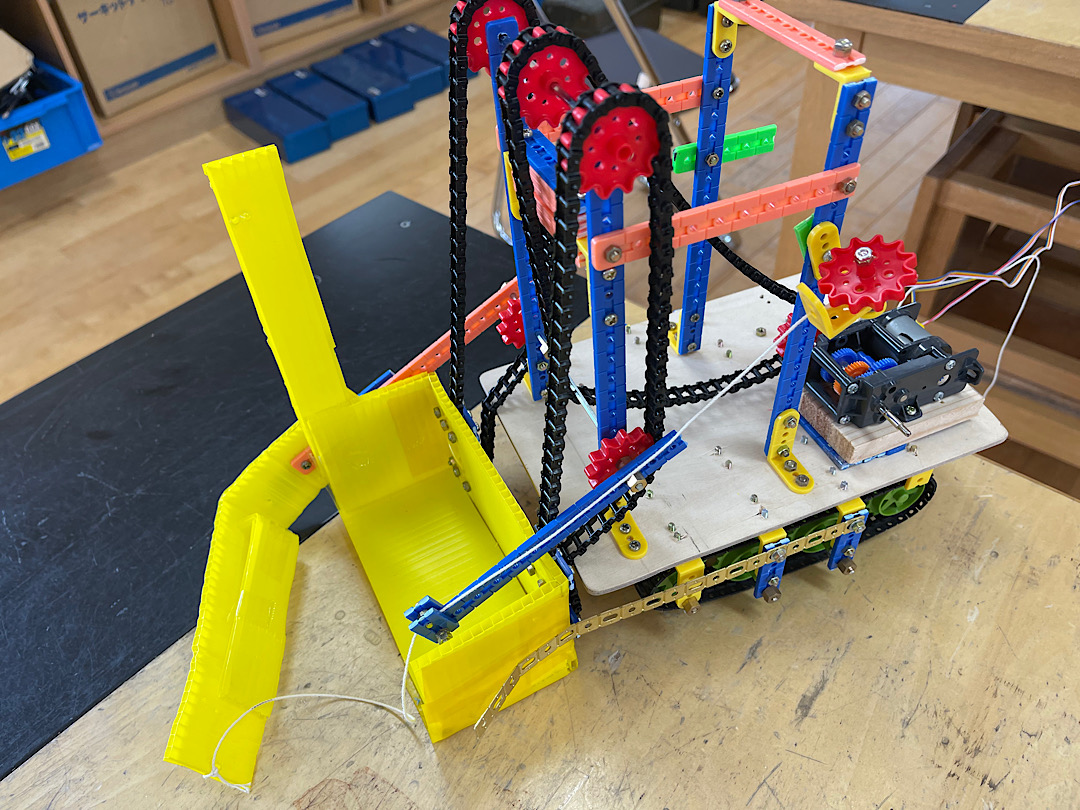
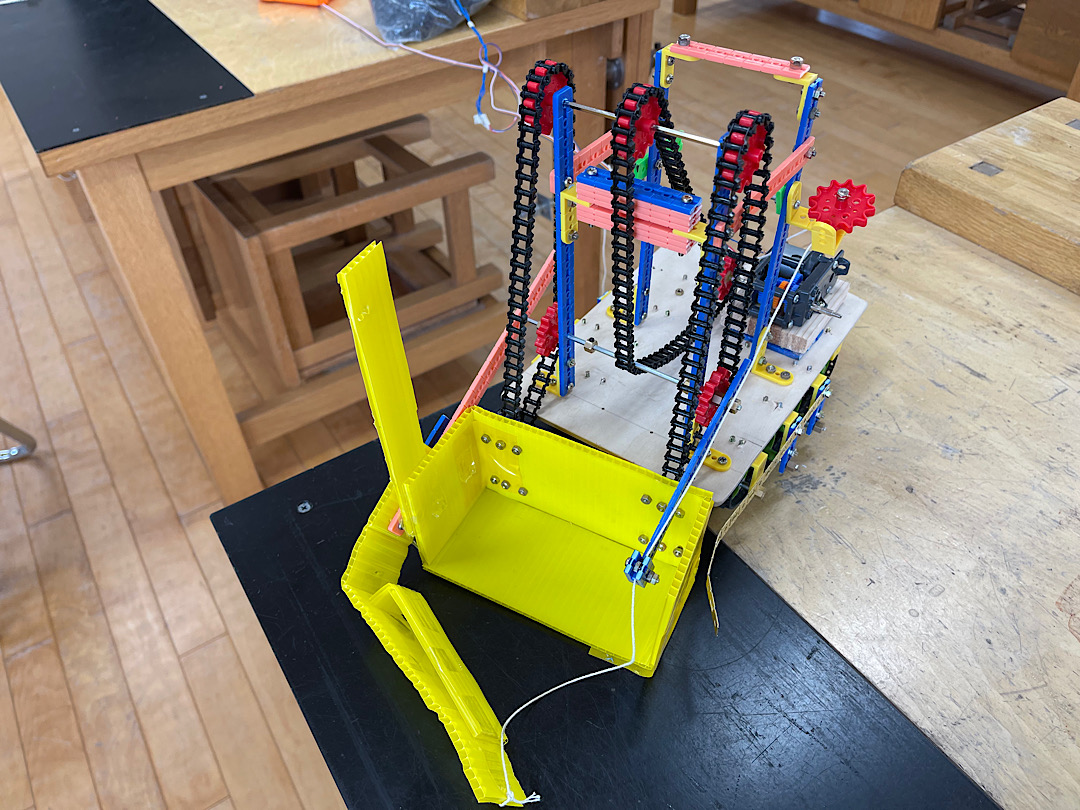
今日までのボール取りロボットの進捗状況、工夫についてまとめます。このボール取りロボットの主な工夫点として,チェーンとシャフトを使いボールを入れる箇所をスムーズに上下運動させることができるようになりました。
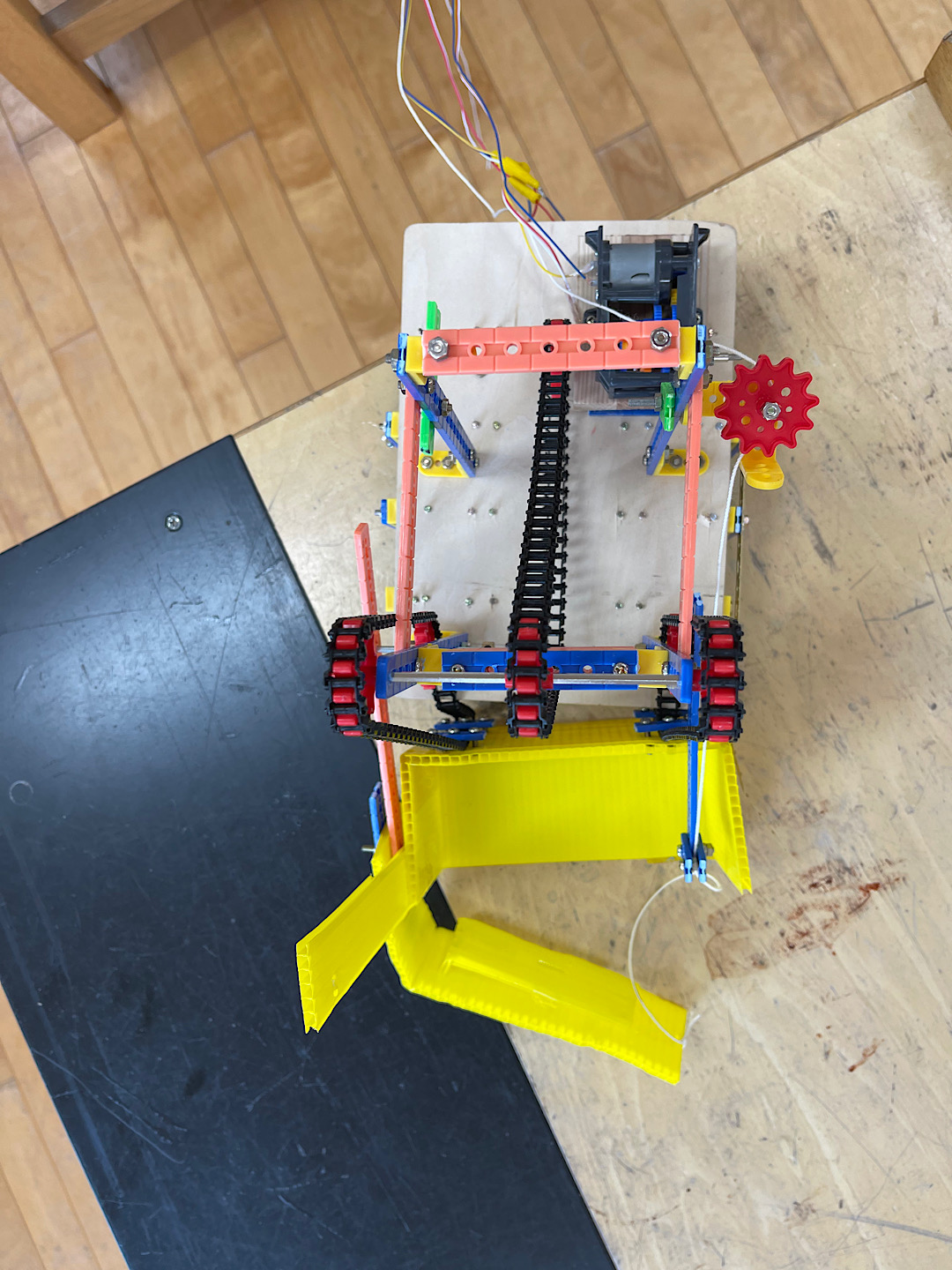
次に,ロボットの移動手段としてキャタピラにしました。ある程度障害物があっても進むことができます。
現在はまだ完成していませんがボールを入れ食い状態にするための機能を模索開発中です。
他にもテーンが引っかからないようにし,移動中にボールが落ちないように長めの棒をつけたりコントローラーの導線を強化したりしました。
コメント