☆初めまして&お久しぶりです☆
今年は、ShoronpoはShorompo+Σに変更しました。一部メンバーの変更はありますが、今年度もよろしくお願いします。 (Shoronpoのnはmになりました。)
さて、今年は制御部門に挑戦することになりました。昨年のようにロボットを作るだけでなく、プログラミングも必要なので、頑張っていきたいです。早速ですが、僕たちの作戦・計画について説明していこうかと思います。
もちろん満点を目指しています。障害物にも挑戦するつもりです。
現在はDCモーターを使用していますが、場合によってはサーボモーターに変更することがあります
アームはすでにサーボモーターを使用することが決定しています。
センサーにはソニックセンサーを使用します。センサーの測定値をモーターの出力値に代入する感じです。
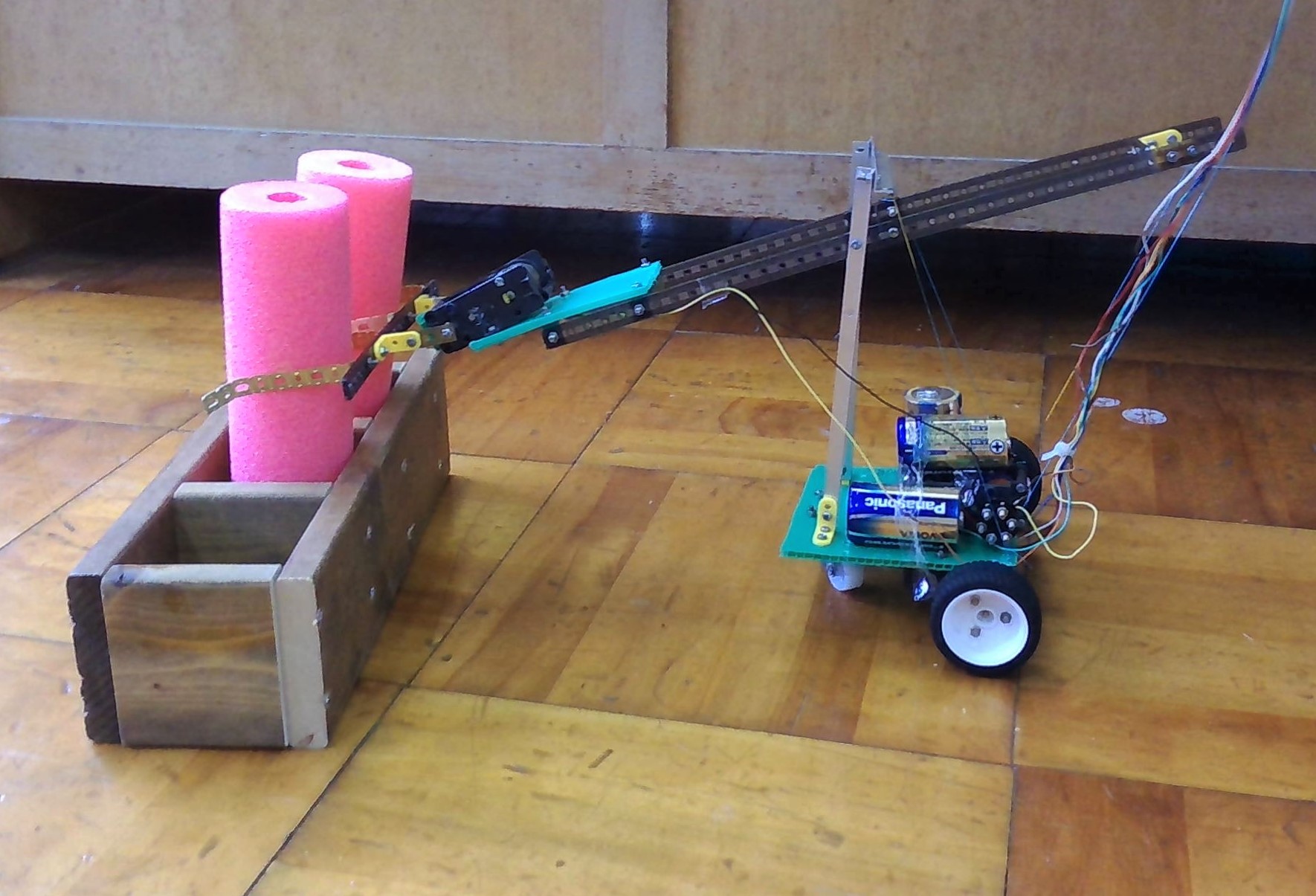
左の画像は前回のロボコン会議でも使用した画像ですが、このように返しのついたアームで下から差し込むようにして取りたいと思っています。
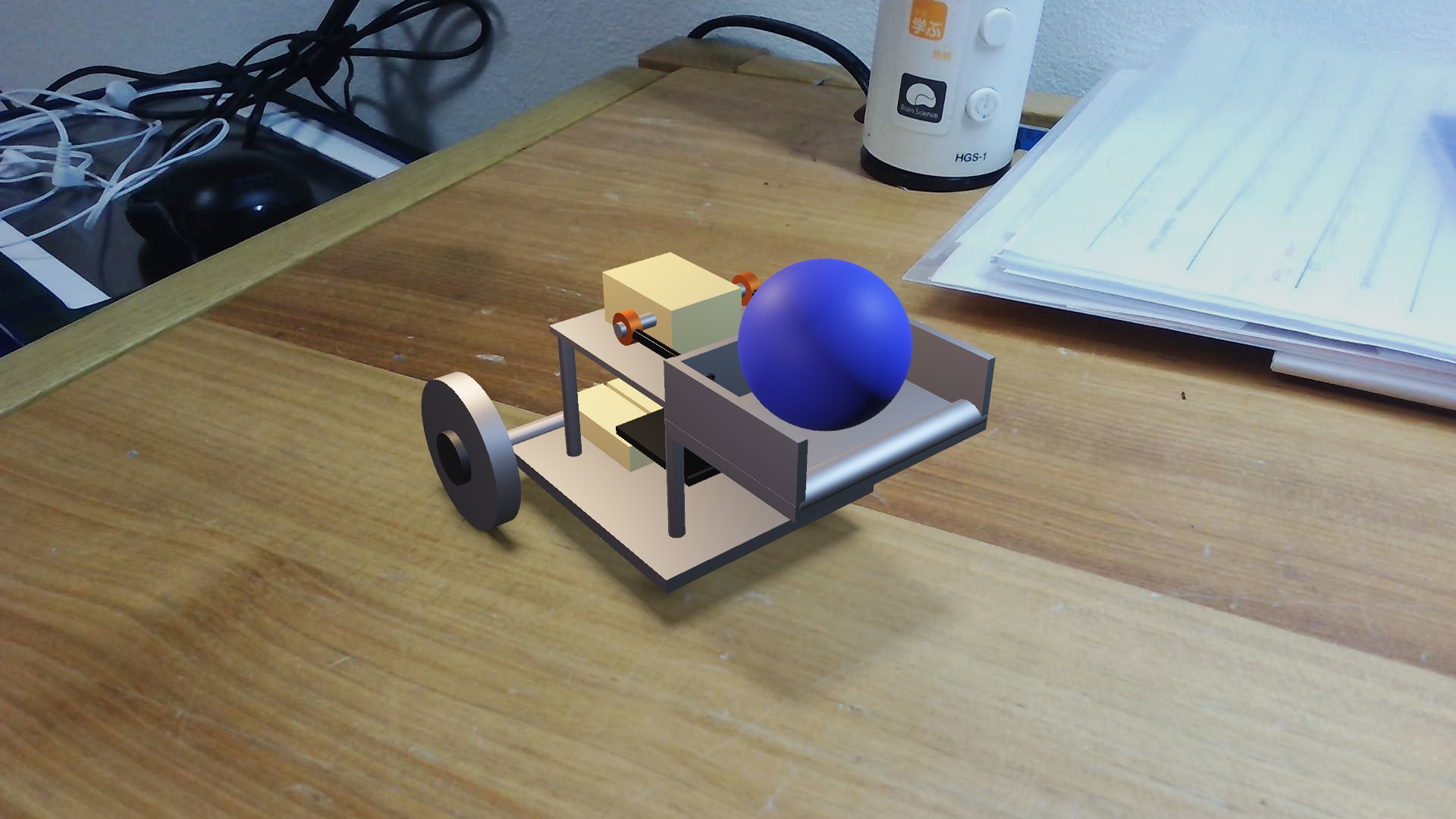
右の画像は3Dビューアーの「Mixed Reality」という機能で撮った写真です。青いのがボールです。


コメント