韋駄天(2020/10/17)
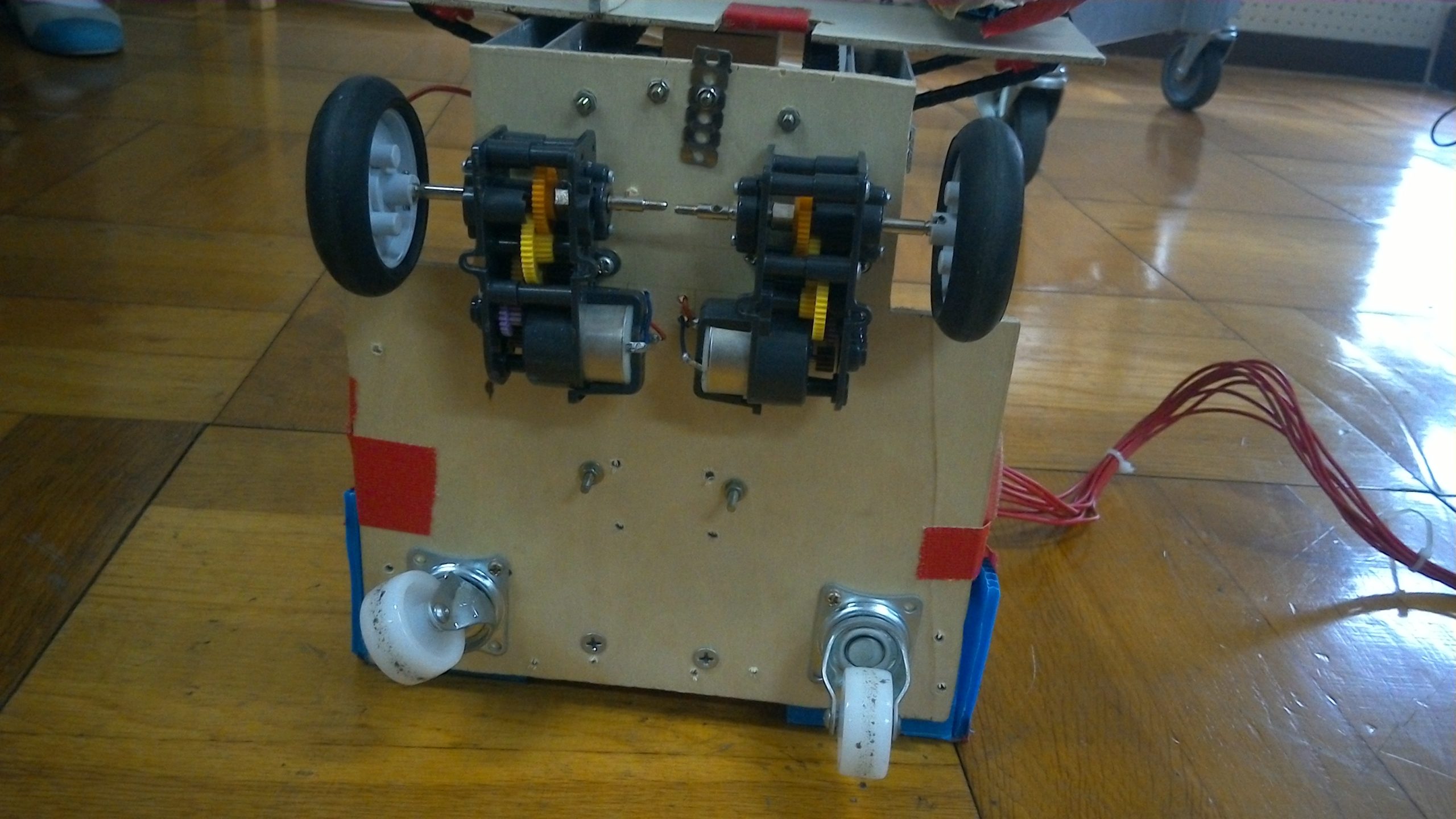
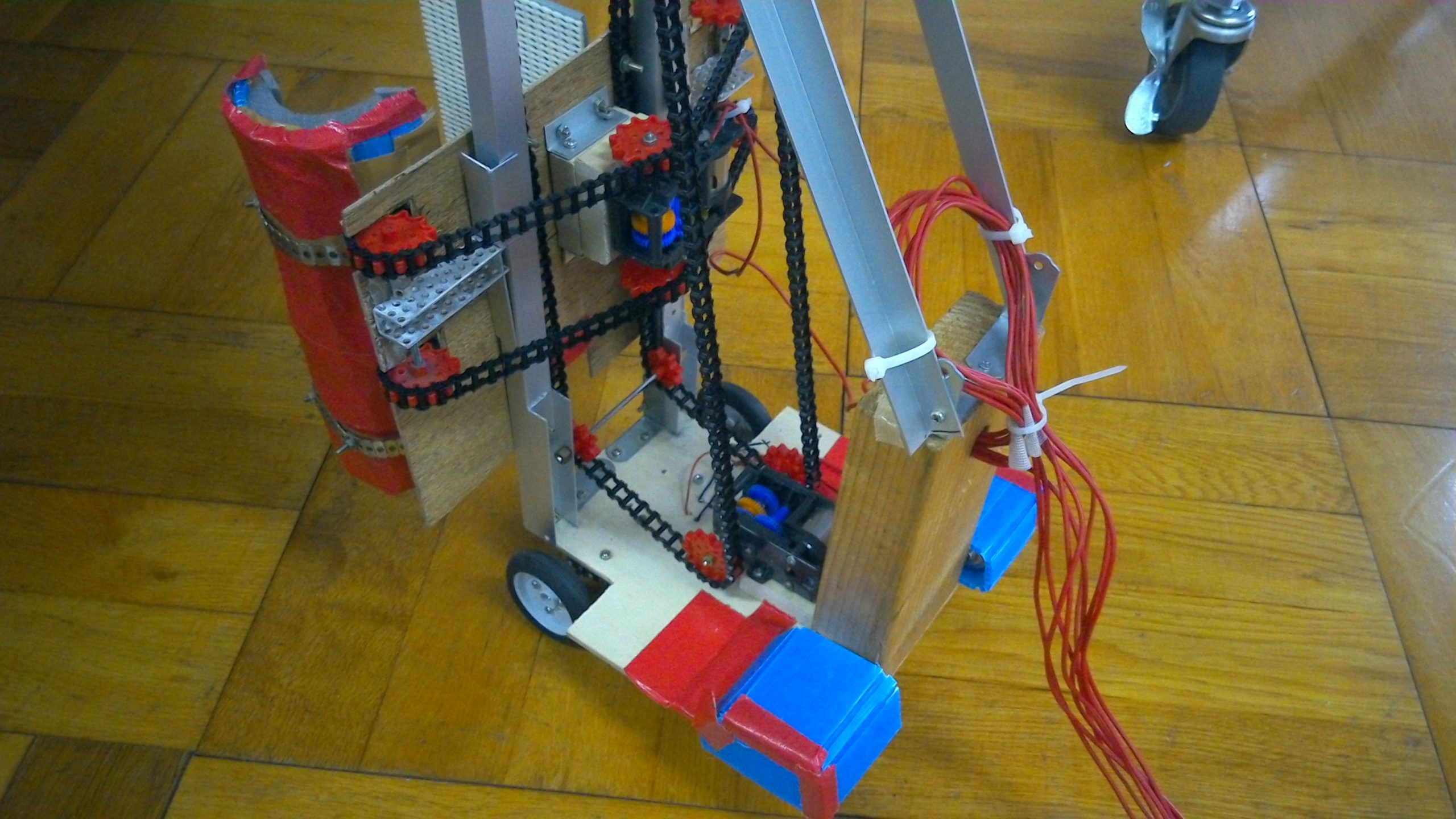
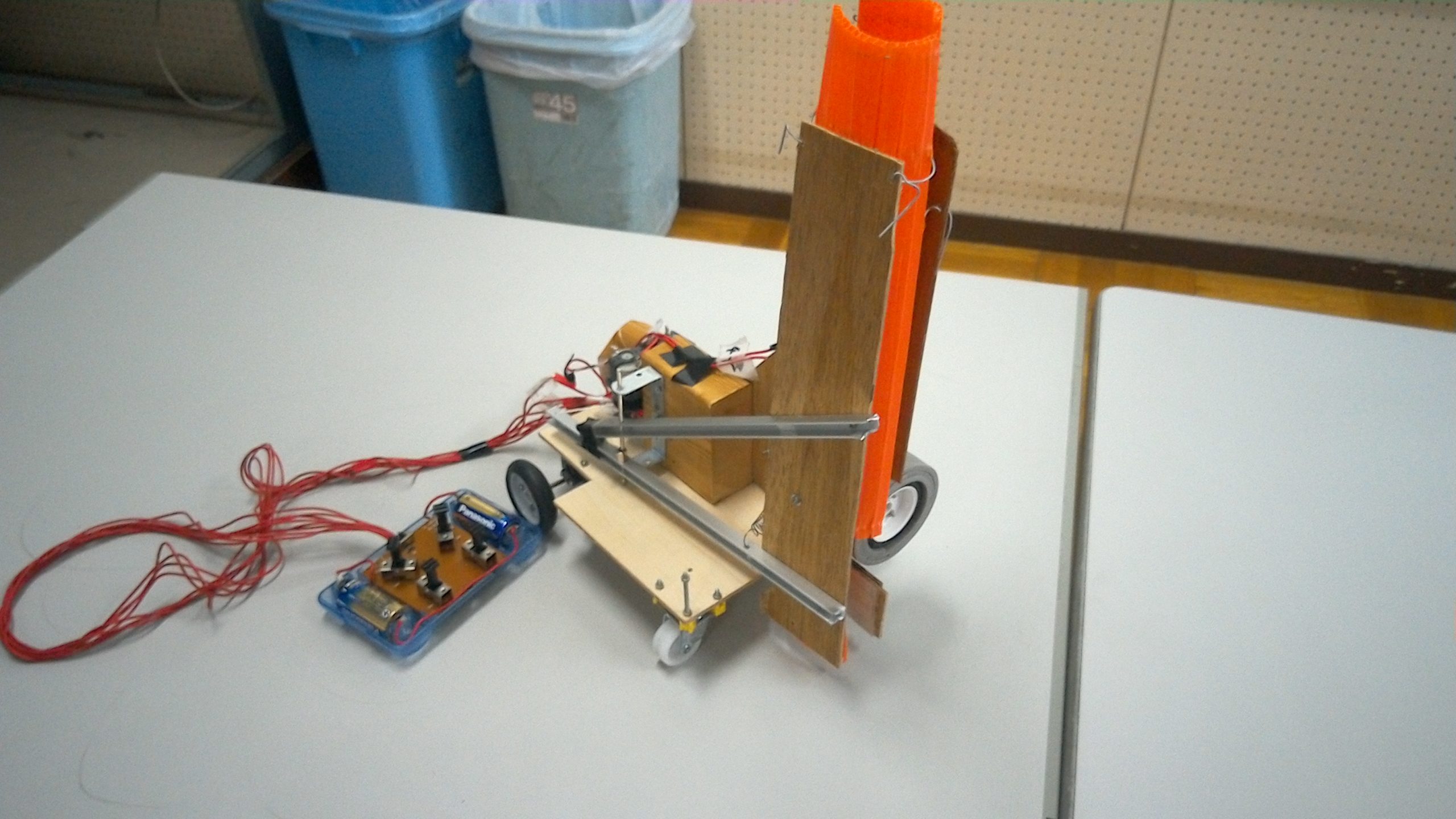
私たちのロボットは、まずアーム部分から作り始めました。どのような形なら缶をつかみやすいかを考えて、アームが平行に動くような形がつかみやすいと考え今のアームが完成しました。アームには6速ギアを使用していて、ラダーチェーンでアームが動くようになっています。アームの内側にはスポンジがあり滑り止めの役割をしています。次に、作り始めたのは車体です。車体部分のモーターには4速ギアを使用しています。タイヤを前に付けたのは缶を積むとき操作しやすいと思い前にタイヤを前に付けました。最後に作り始めたのは、アームを上下に動かす機構です。最初は、平行クランク機構にするかラダーチェーンで動かすか迷っていましたが、アームとの相性も考えラダーチェーンを使用することに決まりました。使用しているギアは、最初は4速ギアを使用していましたが、重い缶を持ち上げることが出来なかったので、パワーのある6速ギアに変更しました。また、コントローラーにも工夫をしていて、電流を多く伝えられるように太い導線を使用しています。



コメント
工夫されていて凄いロボットです!参考になります。
タイムが短くてびっくりしました。
さすが「韋駄天」ですね!