cAm-08
(株)キューブ
http://www.cam-system.jp

8つのカムで2足歩行を実現
機械要素(カム)・機構(リンク機構)の学習に参考として使えます!





The Perpetual Humanoid Model
cAm-08
(株)キューブ
http://www.cam-system.jp
8つのカムで2足歩行を実現
機械要素(カム)・機構(リンク機構)の学習に参考として使えます!
ロボフェスタ神奈川2001
横浜会場(パシフィコ横浜)
2001年11月16日~11月25日
「CAM-08」開発の過程が紹介されていました。


「CAM-08」に使われている「カム」


| 「CAM-08」開発ストーリー | |
| 「人型ロボットをTOYの分野で」と(株)キューブによって1999年春から開発が始められました。 約2年で7体のテストモデルを試作し、平地でのみ直進2足歩行が可能なモデル「CAM-08」が完成しました。 開発にかかわった方は、 「完全に技術サイドからの開発だったのもかかわらず、ぎこちなく体重移動しながら健気に歩く姿を見て、かわいいと思った とき、技術と感性は決して相対するものではないのだなと実感」 したそうです。 |
|
 |
PROT-01 1999年5月 「20~30cmの大きさで、2足歩行して階段を登る」というテーマで開発が 進められた初めてのモデル。 足を垂直に上げ、軸足を回転することで歩行するというシステム。 実際には階段を登らないが、センサーを付けることで可能になるという理論 は得られる。 まだ人間らしい2足歩行が実現できませんでした。 |
 |
PROT-02 1999年7月 シンプルな構造で平地を普通に歩くという点に絞って開発されたモデル。 ひざの関節がなく、体の重心移動の衝撃を大きくした足裏で吸収している ため、人間の2足歩行というリアルさに欠けていました。 |
 |
PROT-03 1999年8月 大腿部、ひざ、足首のそれぞれの動きをディスク状のカムで制御するという 「CAM-SYSTEM」の原点となったモデル。 「平地でのみ人間と同じように2足歩行する機構」という1点に開発コンセプト を絞り込んで完成させたモデル。 |
 |
PROT-04 1999年10月 商品化のために、機構のスリム化が行われました。カムの小型化に伴い、 カム曲線の精度が落ちてしまい正確なコントロールが不能となり、2足歩行が 不可能になってしまう。 |
 |
PROT-05 2000年1月 2足歩行のための機構がほぼ完成したモデル。 外観デザインとCAM-SYSTEMの特許申請準備に入りました。 |
 |
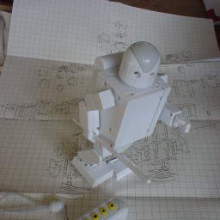
PROT-06 2000年4月 さまざまなデザイン案が検討され、最終的にシンプルで機構に準じたデザイン となり、「CAM-08」とほぼ同じデザインがこのときデザインされています。 動作調整のため、試作カムが数十枚製作されカムの最終調整に入りました。 |
 |
PROT-07 2000年10月 生産のために工場へサンプルとして送るために製作されたもので、金型製作 のために分解されています。赤外線コントロールなどの電子部品も追加されて います。 |
 |
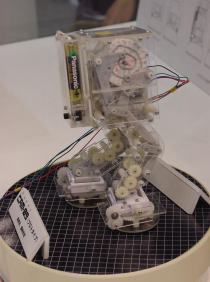
CAM-08 平地でのみ直進2足歩行が可能なモデル「CAM-08」が完成しました。 |
| 「CAM-09」プロトタイプ(開発研究モデル) 「CAM-08」で開発・量産に成功したカムによる「2足歩行」機構を継承し、さらに「左右旋回」の機能を持たせることを目的 としています。足底の円盤が回転することで身体全体を旋回させる機構を採用しており、旋回のための専用モーターを、 1基追加して、歩行中のどの状態からでも旋回を可能としています。 |
|
  |
|